STMicroelectronics VL53L5CX مستشعر نطاق الطيران متعدد المناطق

مقدمة
الغرض من دليل المستخدم هذا هو شرح كيفية التعامل مع مستشعر وقت الرحلة (ToF) VL53L5CX ، باستخدام واجهة برمجة تطبيقات التشغيل الخفيف للغاية (ULD). يصف الوظائف الرئيسية لبرمجة الجهاز والمعايرات ونتائج الإخراج.
يعد VL53L5CX جهاز استشعار متطور ToF متعدد المناطق يعزز عائلة منتجات STMicroelectronics Flight Sense. يقع في حزمة مصغرة قابلة لإعادة التدفق، وهو يدمج مصفوفة SPAD ومرشحات الأشعة تحت الحمراء المادية والعناصر الضوئية الحيادية (DOE) لتحقيق أفضل أداء في مختلف ظروف الإضاءة المحيطة مع مجموعة من مواد الغطاء الزجاجي.
يمكن إجراء قياسات المسافة متعددة المناطق حتى 8 × 8 مناطق بمجال قطري عريض يبلغ 63 درجة view (فوف) والتي يمكن أن تكون
تم تخفيضها عن طريق البرمجيات. تقيس كل منطقة من مناطق VL53L5CX مسافة الهدف حتى 4 أمتار، بتردد أقصى يبلغ 60 هرتز.
بفضل خوارزميات الرسم البياني الحاصلة على براءة اختراع من شركة STMicroelectronics، يستطيع VL53L5CX اكتشاف كائنات مختلفة داخل مجال الرؤية.
يوفر الرسم البياني أيضًا مناعة لتغطية التداخل الزجاجي الذي يتجاوز 60 سم.

مراجع
ورقة بيانات VL53L5CX (DS13754).
اختصارات
| ترميز الاختصارات | تعريف |
| وزارة الطاقة | العنصر البصري الانكساري |
| مجال الرؤية | مجال view |
| أي²سي | دائرة متكاملة (ناقل تسلسلي) |
| Kcps / سباد | كيلو العد في الثانية لكل سباد (وحدة تستخدم لتحديد عدد الفوتونات في مجموعة سباد) |
| كبش | ذاكرة الوصول العشوائي |
| إس سي إل | خط الساعة التسلسلي |
| السبتيون | البيانات التسلسلية |
| سباد | الصمام الثنائي الفوتوني الجليدي |
| إلى الأبد | الوقت من الطيران |
| يو إل دي | سائق خفيف جدا |
| في سي إس إي إل | الصمام الثنائي الباعث لسطح التجويف العمودي |
| في اتش في | حجم مرتفع جدًاtage |
| اكس توك | تداخل الحديث |
الوصف الوظيفي
إنتهى النظامview
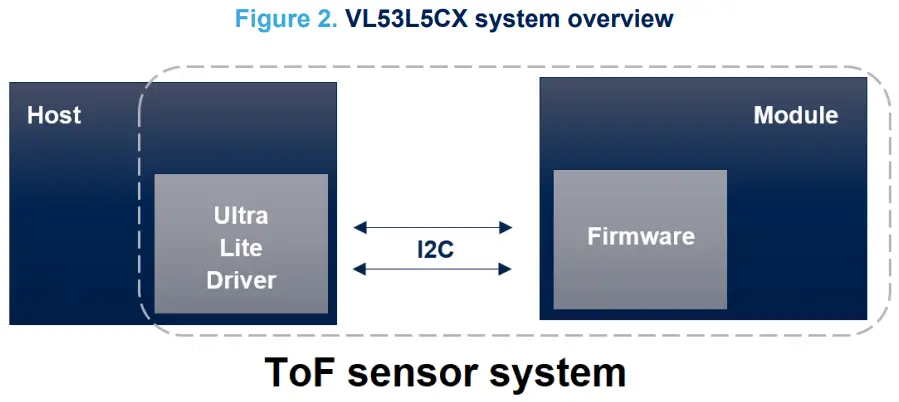
يتكون نظام VL53L5CX من وحدة أجهزة وبرنامج تشغيل خفيف للغاية (VL53L5CX ULD) يعمل على مضيف (انظر الشكل أدناه). تحتوي وحدة الأجهزة على مستشعر ToF. توفر شركة STMicroelectronics برنامج التشغيل، والذي يشار إليه في هذا المستند باسم "برنامج التشغيل". يصف هذا المستند وظائف برنامج التشغيل التي يمكن للمضيف الوصول إليها. تتحكم هذه الوظائف في المستشعر وتحصل على بيانات المدى.
التوجه الفعال
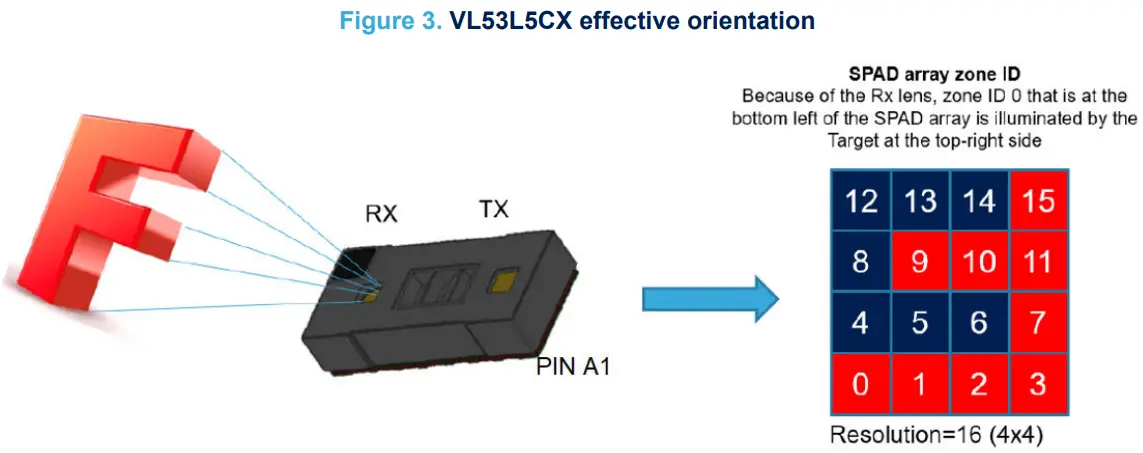
تشتمل الوحدة على عدسة فوق فتحة Rx ، والتي تقلب (أفقيًا وعموديًا) الصورة الملتقطة للهدف. وبالتالي ، فإن المنطقة المحددة على أنها المنطقة 0 ، في الجزء السفلي الأيسر من صفيف SPAD ، مضاءة بواسطة هدف يقع في الجانب الأيمن العلوي من المشهد.
المخططات وتكوين I²C
يتم التعامل مع الاتصال بين برنامج التشغيل والبرامج الثابتة بواسطة I²C، مع إمكانية التشغيل حتى 1 ميجاهرتز. يتطلب التنفيذ عمليات سحب على خطوط SCL وSDA. ارجع إلى ورقة بيانات VL53L5CX لمزيد من المعلومات.
يحتوي جهاز VL53L5CX على عنوان I²C افتراضي وهو 0x52. ومع ذلك، من الممكن تغيير العنوان الافتراضي لتجنب التعارضات مع الأجهزة الأخرى، أو تسهيل إضافة وحدات VL53L5CX متعددة إلى النظام للحصول على مجال رؤية أكبر للنظام. يمكن تغيير عنوان I²C باستخدام الدالة vl53l5cx_set_i2c_address().
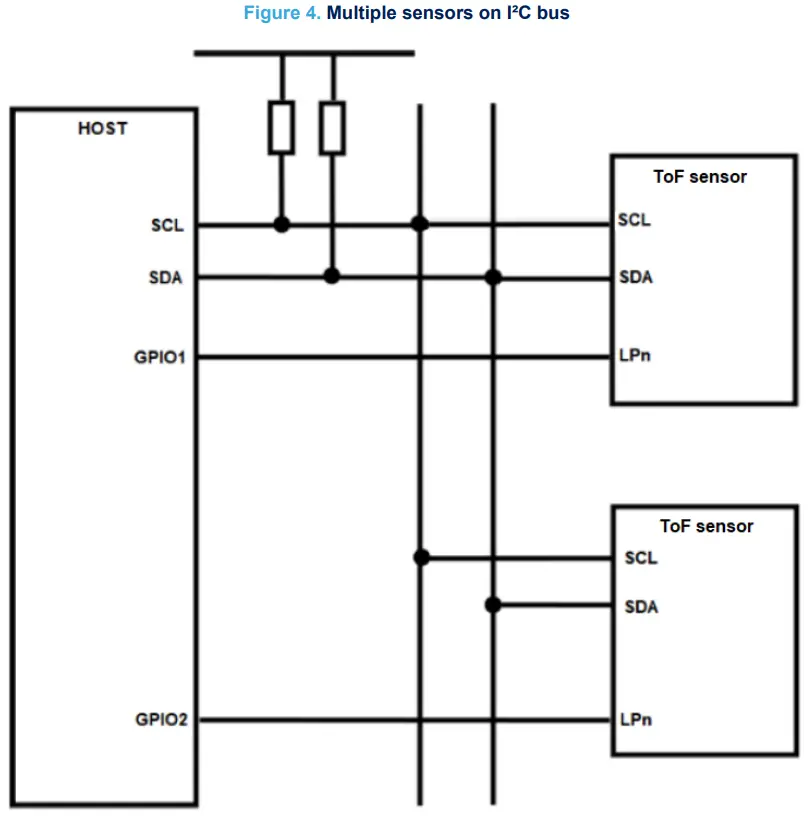
للسماح لأحد الأجهزة بتغيير عنوان I²C الخاص به دون التأثير على الأجهزة الأخرى الموجودة على ناقل I²C، من المهم تعطيل اتصال I²C للأجهزة التي لم يتم تغييرها. الإجراء هو التالي:
- قم بتشغيل النظام كالمعتاد.
- اسحب دبوس LPn للجهاز الذي لن يتم تغيير عنوانه.
- اسحب دبوس LPn الخاص بالجهاز الذي تم تغيير عنوان I²C إليه.
- قم ببرمجة عنوان I²C على الجهاز باستخدام الدالة set_i2c_address().
- اسحب دبوس LPn للجهاز الذي لم تتم إعادة برمجته.
يجب أن تكون جميع الأجهزة متاحة الآن على ناقل I²C. كرر الخطوات المذكورة أعلاه لجميع أجهزة VL53L5CX الموجودة في النظام والتي تتطلب عنوان I²C جديدًا.
محتوى الحزمة وتدفق البيانات
بنية السائق والمحتوى
تتكون حزمة VL53L5CX ULD من أربعة مجلدات. يوجد برنامج التشغيل في المجلد / VL53L5CX_ULD_API.
يتكون السائق من إلزامي واختياري fileس. اختياري fileس هي plugins تستخدم لتوسيع ميزات ULD.
يبدأ كل ملحق بالكلمة "vl53l5cx_plugin" (على سبيل المثال vl53l5cx_plugin_xtalk.h). إذا كان المستخدم لا يريد المقترح plugins، يمكن إزالتها دون التأثير على ميزات السائق الأخرى. الشكل التالي يمثل إلزامية files والاختياري plugins.
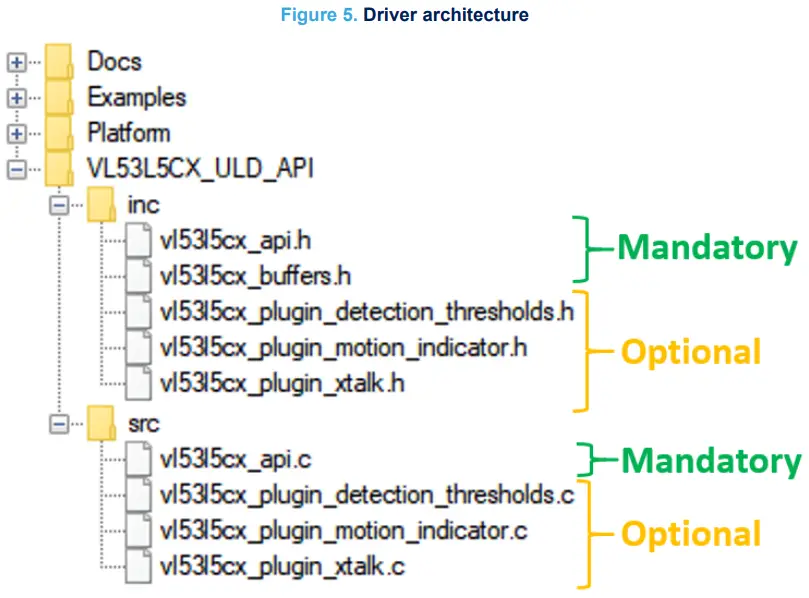
يحتاج المستخدم أيضًا إلى تنفيذ اثنين files الموجود في مجلد / Platform. المنصة المقترحة عبارة عن هيكل فارغ ، ويجب ملؤها بوظائف مخصصة.
ملحوظة: المنصة file يحتوي على وحدات ماكرو إلزامية لاستخدام ULD. كل ال file المحتوى إلزامي لاستخدام ULD بشكل صحيح.
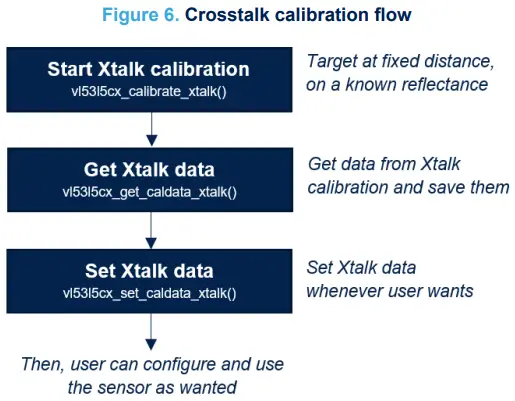
تدفق المعايرة
يتم تعريف الحديث المتبادل (Xtalk) على أنه مقدار الإشارة المستلمة على مصفوفة SPAD، والتي تنتج عن انعكاس ضوء VCSEL داخل النافذة الواقية (زجاج الغطاء) المضافة أعلى الوحدة. تتم معايرة وحدة VL53L5CX ذاتيًا، ويمكن استخدامها دون أي معايرة إضافية.
قد تكون معايرة الحديث المتبادل مطلوبة إذا كانت الوحدة محمية بغطاء زجاجي. يتميز الطراز VL53L5CX بأنه محصن ضد التداخلات التي تتجاوز 60 سم بفضل خوارزمية الرسم البياني. ومع ذلك، على مسافات قصيرة أقل من 60 سم، يمكن أن يكون Xtalk أكبر من الإشارة الفعلية المرتجعة. وهذا يعطي قراءة خاطئة للهدف أو يجعل الأهداف تبدو أقرب مما هي عليه بالفعل. يتم تضمين كافة وظائف معايرة الحديث المتبادل في البرنامج المساعد Xtalk (اختياري). يحتاج المستخدم إلى استخدام file "vl53l5cx_plugin_xtalk".
يمكن معايرة الحديث المتبادل مرة واحدة، ويمكن حفظ البيانات حتى يمكن إعادة استخدامها لاحقًا. مطلوب هدف على مسافة ثابتة، مع انعكاس معروف. الحد الأدنى للمسافة المطلوبة هو 600 ملم، ويجب أن يغطي الهدف مجال الرؤية بالكامل. اعتمادًا على الإعداد، يمكن للمستخدم تعديل الإعدادات لتكييف معايرة الحديث المتبادل، كما هو مقترح في الجدول التالي.
طاولة 1. الإعدادات المتاحة للمعايرة
| جلسة | الحد الأدنى | مقترح من STMicroelectronics | الأعلى |
| المسافة [مم] | 600 | 600 | 3000 |
| عدد الثوانيampليه | 1 | 4 | 16 |
| انعكاس [٪] | 1 | 3 | 99 |
ملحوظة: زيادة عدد sampيزيد les من الدقة ، ولكنه يزيد أيضًا من وقت المعايرة. الوقت بالنسبة لعدد samples هي خطية ، والقيم تتبع المهلة التقريبية:
- 1 ثانيةample ≈ 1 ثانية
- 4 ثانيةampليه ≈ 2.5 ثانية
- 16 ثانيةampليه ≈ 8.5 ثانية
يتم إجراء المعايرة باستخدام الدالة vl53l5cx_calibrate_xtalk(). يمكن استخدام هذه الوظيفة في أي وقت. ومع ذلك، يجب تهيئة المستشعر أولاً. يمثل الشكل التالي تدفق معايرة الحديث المتبادل.
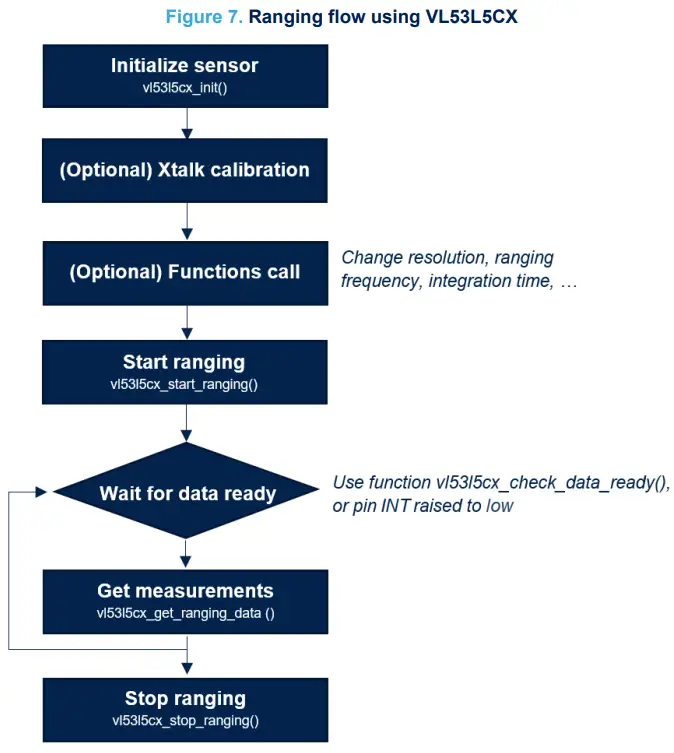
يتراوح التدفق
يمثل الشكل التالي تدفق النطاق المستخدم للحصول على القياسات. يجب استخدام معايرة Xtalk واستدعاءات الوظائف الاختيارية قبل بدء جلسة النطاق. لا يمكن استخدام وظائف get / set أثناء جلسة النطاق ، كما أن البرمجة "أثناء التنقل" غير مدعومة.
الميزات المتوفرة
تتضمن VL53L5CX ULD API العديد من الوظائف، التي تسمح للمستخدم بضبط المستشعر، اعتمادًا على حالة الاستخدام. جميع الوظائف المتوفرة للسائق موضحة في الأقسام التالية.
التهيئة
يجب أن تتم التهيئة قبل استخدام مستشعر VL53L5CX. تتطلب هذه العملية من المستخدم:
- قم بتشغيل المستشعر (تم ضبط دبابيس VDDIO و AVDD و LPn على مرتفع ، وتعيين دبوس I2C_RST على 0)
- استدعاء الدالة vl53l5cx_init(). تقوم الوظيفة بنسخ البرنامج الثابت (حوالي 84 كيلو بايت) إلى الوحدة. ويتم ذلك عن طريق تحميل التعليمات البرمجية على واجهة I²C، وتنفيذ روتين تمهيد لإكمال التهيئة.
إدارة إعادة تعيين جهاز الاستشعار
لإعادة ضبط الجهاز ، يجب تبديل المسامير التالية:
- اضبط دبابيس VDDIO و AVDD و LPn على مستوى منخفض.
- انتظر 10 مللي ثانية.
- اضبط دبابيس VDDIO وAVDD وLPn على المستوى العالي.
ملحوظة: يؤدي تبديل دبوس I2C_RST فقط إلى إعادة تعيين اتصال I²C.
دقة
الدقة يتوافق مع عدد المناطق المتاحة. يحتوي مستشعر VL53L5CX على نوعين من الدقة الممكنة: 4 × 4 (16 منطقة) و 8 × 8 (64 منطقة). بشكل افتراضي ، يتم برمجة المستشعر في 4 × 4.
تتيح الوظيفة vl53l5cx_set_resolution() للمستخدم تغيير الدقة. وبما أن تردد تحديد المدى يعتمد على الدقة، يجب استخدام هذه الوظيفة قبل تحديث تردد تحديد المدى. علاوة على ذلك، يؤدي تغيير الدقة أيضًا إلى زيادة حجم حركة المرور على ناقل I²C عند قراءة النتائج.
تردد المدى
يمكن استخدام تردد المدى لتغيير تردد القياس. نظرًا لأن الحد الأقصى للتردد يختلف بين دقة 4 × 4 و 8 × 8 ، يجب استخدام هذه الوظيفة بعد اختيار الدقة. يتم سرد القيم الدنيا والحد الأقصى المسموح بها في الجدول التالي.
طاولة 2. الحد الأدنى والحد الأقصى للترددات
| دقة | تردد النطاق الأدنى [هرتز] | أقصى تردد المدى [هرتز] |
| 4×4 | 1 | 60 |
| 8×8 | 1 | 15 |
يمكن تحديث التردد باستخدام الوظيفة vl53l5cx_set_ranging_frequency_hz (). بشكل افتراضي ، يتم ضبط تردد النطاق على 1 هرتز.
وضع تحديد المدى
يسمح وضع المدى للمستخدم بالاختيار بين النطاق بين الأداء العالي أو استهلاك الطاقة المنخفض. هناك وضعان مقترحان:
- مستمر: يلتقط الجهاز باستمرار إطارات بتردد نطاق يحدده المستخدم. يتم تمكين VCSEL أثناء كل المدى ، لذا فإن أقصى مسافة للمدى والحصانة المحيطة تكون أفضل. يُنصح بهذا الوضع للقياسات السريعة أو الأداء العالي.
- مستقل: هذا هو الوضع الافتراضي. يلتقط الجهاز باستمرار إطارات بتردد نطاق يحدده المستخدم. يتم تمكين VCSEL خلال فترة يحددها المستخدم ، باستخدام الوظيفة vl53l5cx_set_integration_time_ms (). نظرًا لعدم تمكين VCSEL دائمًا ، يتم تقليل استهلاك الطاقة. الفوائد أكثر وضوحا مع انخفاض التردد النطاق. ينصح بهذا الوضع لتطبيقات الطاقة المنخفضة.
يمكن تغيير وضع النطاق باستخدام الوظيفة vl53l5cx_set_ranging_mode ().
وقت التكامل
يعد وقت التكامل ميزة متاحة فقط باستخدام وضع النطاق المستقل (راجع القسم 4.5: وضع النطاق). يسمح للمستخدم بتغيير الوقت أثناء تمكين VCSEL. إن تغيير وقت التكامل إذا تم ضبط وضع النطاق على الوضع المستمر ليس له أي تأثير. يتم ضبط وقت التكامل الافتراضي على 5 مللي ثانية.
يختلف تأثير وقت التكامل عن دقة 4 × 4 و 8 × 8. يتكون القرار 4 × 4 من وقت تكامل واحد ، ويتكون الاستبانة 8 × 8 من أربع مرات تكامل. تمثل الأرقام التالية انبعاث VCSEL لكلا القرارين.
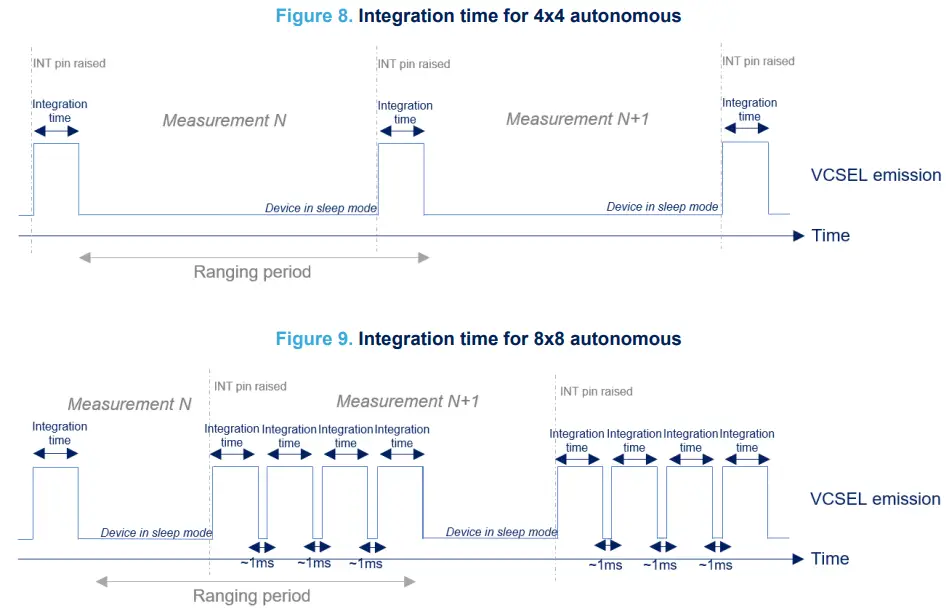
يجب أن يكون مجموع جميع أوقات التكامل + 1 مللي ثانية الحمل أقل من فترة القياس. وبخلاف ذلك، يتم زيادة فترة النطاق تلقائيًا.
أوضاع الطاقة
يمكن استخدام أوضاع الطاقة لتقليل استهلاك الطاقة عند عدم استخدام الجهاز. يمكن أن يعمل VL53L5CX في أحد أوضاع الطاقة التالية:
- تنبيه: الجهاز مضبوط على HP idle (طاقة عالية) ، في انتظار التعليمات.
- وضع السكون: تم ضبط الجهاز على وضع الخمول LP (طاقة منخفضة)، وهي حالة الطاقة المنخفضة. لا يمكن استخدام الجهاز حتى يتم ضبطه على وضع الاستيقاظ.
يحتفظ هذا الوضع بالبرامج الثابتة والتكوين.
يمكن تغيير وضع الطاقة باستخدام الوظيفة vl53l5cx_set_power_mode(). الوضع الافتراضي هو الاستيقاظ.
ملحوظة: إذا أراد المستخدم تغيير وضع الطاقة ، فيجب ألا يكون الجهاز في حالة النطاق.
براية
الإشارة التي يتم إرجاعها من الهدف ليست نبضة نظيفة ذات حواف حادة. تنحدر الحواف بعيدًا وقد تؤثر على المسافات المذكورة في المناطق المجاورة. يتم استخدام المبراة لإزالة بعض أو كل الإشارة الناتجة عن وهج الحجاب.
السابقampيمثل le الموضح في الشكل التالي هدفًا قريبًا عند 100 مم متمركز في FoV ، وهدفًا آخر ، أبعد من ذلك عند 500 مم. اعتمادًا على قيمة المبراة ، قد يظهر الهدف القريب في مناطق أكثر من الهدف الحقيقي.
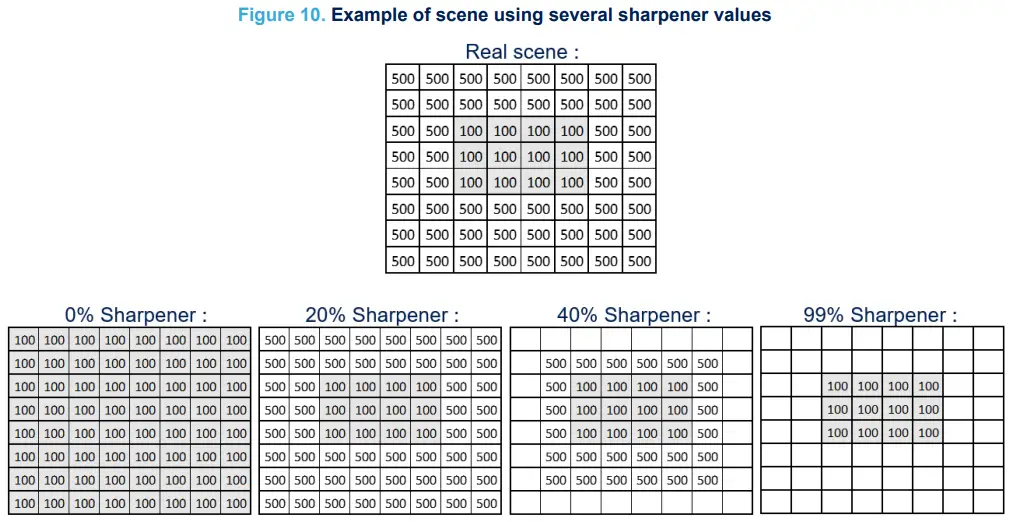
يمكن تغيير المبراة باستخدام الوظيفة vl53l5cx_set_sharpener_percent(). تتراوح القيم المسموح بها بين 0% و99%. القيمة الافتراضية هي 5%.
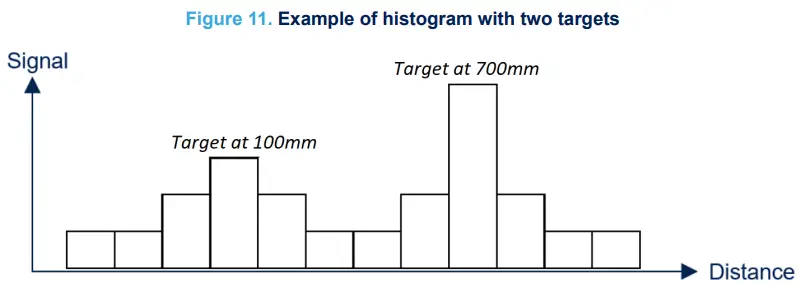
الترتيب المستهدف
يمكن لـ VL53L5CX قياس عدة أهداف لكل منطقة. بفضل معالجة المدرج التكراري ، يستطيع المضيف اختيار ترتيب الأهداف المبلغ عنها. هناك خياران:
- الأقرب: الهدف الأقرب هو أول هدف تم الإبلاغ عنه
- الأقوى: الهدف الأقوى هو أول هدف تم الإبلاغ عنه
يمكن تغيير الترتيب المستهدف باستخدام الوظيفة vl53l5cx_set_target_order(). الترتيب الافتراضي هو الأقوى.
السابقampيمثل le في الشكل التالي الكشف عن هدفين. واحد عند 100 مم بانعكاس منخفض والآخر عند 700 مم بانعكاس مرتفع.
أهداف متعددة لكل منطقة
يمكن لـ VL53L5CX قياس ما يصل إلى أربعة أهداف لكل منطقة. يمكن للمستخدم تكوين عدد الأهداف التي تم إرجاعها بواسطة جهاز الاستشعار.
ملحوظة: الحد الأدنى للمسافة بين هدفين ليتم اكتشافهما هو 600 ملم.
الاختيار غير ممكن من السائق؛ يجب أن يتم ذلك في "Platform.h" file. يجب تعيين الماكرو VL53L5CX_NB_ TARGET_PER_ZONE على قيمة تتراوح بين 1 و4. ترتيب الهدف الموضح في القسم 4.9: يؤثر ترتيب الهدف بشكل مباشر على ترتيب الهدف المكتشف. افتراضيًا، يقوم المستشعر بإخراج هدف واحد فقط كحد أقصى لكل منطقة.
ملحوظة: يؤدي زيادة عدد الأهداف لكل منطقة إلى زيادة حجم ذاكرة الوصول العشوائي المطلوبة
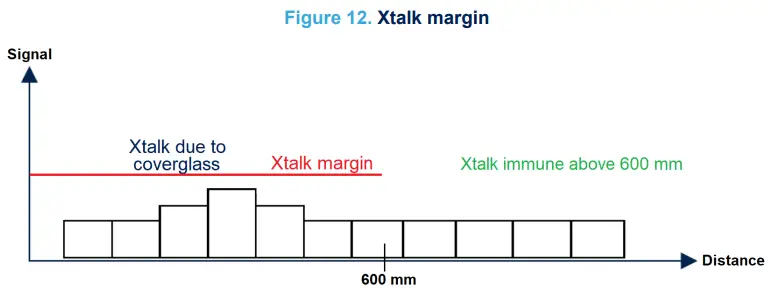
هامش Xtalk
هامش Xtalk هو ميزة إضافية متاحة فقط باستخدام البرنامج المساعد Xtalk. c و fileيجب استخدام 'vl53l5cx_plugin_xtalk'.
يتم استخدام الهامش لتغيير عتبة الكشف عند وجود غطاء زجاجي أعلى المستشعر. يمكن زيادة الحد لضمان عدم اكتشاف زجاج الغطاء مطلقًا، بعد ضبط بيانات معايرة الحديث المتبادل. على سبيل المثالample، يمكن للمستخدم تشغيل معايرة الحديث المتبادل على جهاز واحد، وإعادة استخدام نفس بيانات المعايرة لجميع الأجهزة الأخرى. يمكن استخدام هامش Xtalk لضبط تصحيح الحديث المتبادل. يمثل الشكل أدناه هامش Xtalk.
عتبات الكشف
بالإضافة إلى إمكانيات النطاق العادية ، يمكن برمجة المستشعر لاكتشاف كائن وفقًا لمعايير محددة مسبقًا. هذه الميزة متاحة باستخدام البرنامج المساعد "عتبات الكشف" ، وهو خيار لا يتم تضمينه افتراضيًا في واجهة برمجة التطبيقات. ال fileيجب استخدام ما يسمى "vl53l5cx_plugin_detection_thresholds".
يمكن استخدام الميزة لتشغيل مقاطعة إلى رقم التعريف الشخصي A3 (INT) عند استيفاء الشروط التي يحددها المستخدم. هناك ثلاثة تكوينات ممكنة:
- القرار 4 × 4: استخدام عتبة واحدة لكل منطقة (إجمالي 16 عتبة)
- القرار 4 × 4: استخدام عتبتين لكل منطقة (إجمالي 32 عتبة)
- القرار 8 × 8: استخدام عتبة واحدة لكل منطقة (إجمالي 64 عتبة)
مهما كان التكوين المستخدم ، فإن إجراء إنشاء العتبات وحجم ذاكرة الوصول العشوائي متماثلان. لكل مجموعة حد ، يجب ملء عدة حقول: - معرف المنطقة: معرف المنطقة المحددة (راجع القسم 2.2: التوجه الفعال)
- القياس: القياس للقبض (المسافة ، الإشارة ، عدد SPADs ، ...)
- النوع: نوافذ القياسات (في النوافذ ، خارج النوافذ ، أسفل العتبة المنخفضة ، ...)
- عتبة منخفضة: مستخدم عتبة منخفضة للمشغل. لا يحتاج المستخدم إلى ضبط التنسيق ، يتم التعامل معه تلقائيًا بواسطة واجهة برمجة التطبيقات.
- عتبة عالية: مستخدم ذو عتبة عالية للمشغل. لا يحتاج المستخدم إلى ضبط التنسيق؛ يتم التعامل معها تلقائيًا بواسطة واجهة برمجة التطبيقات (API).
- العملية الحسابية: تستخدم فقط ل 4 × 4 - 2 مجموعات عتبة لكل منطقة. يمكن للمستخدم تعيين مجموعة باستخدام عدة عتبات في منطقة واحدة.
مؤشر الحركة
يحتوي مستشعر VL53L5CX على ميزة البرامج الثابتة المضمنة التي تسمح باكتشاف الحركة في المشهد. يتم حساب مؤشر الحركة بين الإطارات المتسلسلة. يتوفر هذا الخيار باستخدام المكون الإضافي 'vl53l5cx_plugin_motion_indicator'.
تتم تهيئة مؤشر الحركة باستخدام الدالة vl53l5cx_motion_indicator_init(). لتغيير دقة المستشعر، قم بتحديث دقة مؤشر الحركة باستخدام الوظيفة المخصصة: vl53l5cx_motion_indicator_set_resolution().
يمكن للمستخدم أيضًا تغيير الحد الأدنى والحد الأقصى للمسافات للكشف عن الحركة. لا يمكن أن يكون الفرق بين الحد الأدنى والحد الأقصى للمسافات أكبر من 1500 مم. بشكل افتراضي ، يتم تهيئة المسافات بقيم تتراوح بين 400 مم و 1500 مم.
يتم تخزين النتائج في حقل "مؤشر الحركة". في هذا المجال ، تعطي حركة المصفوفة قيمة تحتوي على شدة الحركة لكل منطقة. تشير القيمة العالية إلى تباين عالٍ في الحركة بين الإطارات. تعطي الحركة النموذجية قيمة بين 100 و 500. وتعتمد هذه الحساسية على وقت التكامل والمسافة المستهدفة وانعكاس الهدف.
مزيج مثالي لتطبيقات الطاقة المنخفضة هو استخدام مؤشر الحركة مع وضع المدى المستقل ، وعتبات الكشف المبرمجة على الحركة. هذا يسمح باكتشاف تغيرات الحركة في FoV بأقل استهلاك للطاقة.
تعويض درجة الحرارة الدورية
يتأثر أداء النطاق بتغيرات درجات الحرارة. يشتمل المستشعر VL53L5CX على تعويض درجة الحرارة الذي تتم معايرته مرة واحدة عند بدء البث. ومع ذلك، إذا تطورت درجة الحرارة، فقد لا يتوافق التعويض مع درجة الحرارة الجديدة. لتجنب هذه المشكلة، يمكن للعميل إجراء تعويض دوري لدرجة الحرارة باستخدام VHV التلقائي. تستغرق معايرة درجة الحرارة الدورية بضعة أجزاء من الثانية للتشغيل. يمكن للمستخدم تحديد الفترة.
لاستخدام هذه الميزة، يحتاج العميل إلى:
• استدعاء الدالة vl53l5cx_set_VHV_repeat_count().
• ثم قم بإعطاء عدد الإطارات بين كل معايرة جديدة كوسيطة.
إذا كانت الوسيطة 0، فسيتم تعطيل التعويض.
نتائج متفاوتة
البيانات المتاحة
قد يتم إخراج قائمة واسعة من بيانات الهدف والبيئة خلال أنشطة النطاق. يصف الجدول التالي المعلمات المتاحة للمستخدم.
طاولة 3. الإخراج المتاح باستخدام مستشعر VL53L5CX
| عنصر | Nb بايت (RAM) | وحدة | وصف |
| محيط لكل سباد | 256 | Kcps / سباد | تم إجراء قياس معدل المحيط على صفيف SPAD ، بدون انبعاث فوتون نشط ، لقياس معدل الإشارة المحيطة بسبب الضوضاء. |
| عدد الأهداف المكتشفة | 64 | لا أحد | عدد الأهداف المكتشفة في المنطقة الحالية. يجب أن تكون هذه القيمة هي أول قيمة يتم التحقق منها لمعرفة صلاحية القياس. |
| عدد SPADs الممكنة | 256 | لا أحد | عدد SPADs التي تم تمكينها للقياس الحالي. الهدف العاكس البعيد أو المنخفض ينشط المزيد من سبادس. |
| إشارة لكل سباد | 256 × ملحوظة الهدف أهداف مبرمجة | Kcps / سباد | كمية الفوتونات المقاسة أثناء نبض VCSEL. |
| المدى سيجما | 128 × ملحوظة الهدف أهداف مبرمجة | مليمتر | مقدر سيجما للضوضاء في المسافة المستهدفة المبلغ عنها. |
| مسافة | 128 × ملحوظة الهدف أهداف مبرمجة | مليمتر | مسافة الهدف |
| حالة الهدف | 64 × ملحوظة الهدف أهداف مبرمجة | لا أحد | صحة القياسات. يرى القسم 5.5: النتائج تفسير لمزيد من المعلومات. |
| الانعكاس | 64 × عدد الأهداف المبرمجة | النسبة المئوية | تقدير انعكاس الهدف في المئة |
| مؤشر الحركة | 140 | لا أحد | هيكل يحتوي على نتائج مؤشر الحركة. يحتوي حقل "الحركة" على شدة الحركة. |
ملحوظة: بالنسبة للعديد من العناصر (إشارة لكل لوحة، سيجما، ...) يختلف الوصول إلى البيانات إذا قام المستخدم ببرمجة أكثر من هدف واحد لكل منطقة (انظر القسم 4.10: أهداف متعددة لكل منطقة). انظر السابقينampلو أكواد لمزيد من المعلومات.
تخصيص اختيار الإخراج
بشكل افتراضي، يتم تمكين جميع مخرجات VL53L5CX. إذا لزم الأمر، يمكن للمستخدم تعطيل بعض مخرجات أجهزة الاستشعار.
لا يتوفر تعطيل القياسات على السائق؛ يجب أن يتم تنفيذها في "Platform.h" file. يمكن للمستخدم إعلان وحدات الماكرو التالية لتعطيل المخرجات:
#define VL53L5CX_DISABLE_AMBIENT_PER_SPAD
#define VL53L5CX_DISABLE_NB_SPADS_ENABLED
#define VL53L5CX_DISABLE_NB_TARGET_DETECTED
#define VL53L5CX_DISABLE_SIGNAL_PER_SPAD
#تعريف VL53L5CX_DISABLE_RANGE_SIGMA_MM
#تعريف VL53L5CX_DISABLE_DISTANCE_MM
#تعريف VL53L5CX_DISABLE_TARGET_STATUS
#تعريف VL53L5CX_DISABLE_REFLECTANCE_PERCENT
#define VL53L5CX_DISABLE_MOTION_INDICATOR
وبالتالي، لا يتم الإعلان عن الحقول في بنية النتائج، ولا يتم نقل البيانات إلى المضيف. تم تقليل حجم ذاكرة الوصول العشوائي (RAM) وحجم I²C.
لضمان اتساق البيانات، توصي ST دائمًا بإبقاء "عدد الأهداف المكتشفة" و"حالة الهدف" ممكّنين. يؤدي ذلك إلى تصفية القياسات اعتمادًا على حالة الهدف (راجع القسم 5.5: تفسير النتائج).
الحصول على نتائج متدرجة
خلال جلسة النطاق ، هناك طريقتان لمعرفة ما إذا كانت بيانات النطاق الجديدة متاحة:
- وضع الاقتراع: يستخدم باستمرار الوظيفة vl53l5cx_check_data_ready (). يكتشف تيارًا جديدًا يتم إرجاعه بواسطة المستشعر.
- وضع المقاطعة: ينتظر رفع المقاطعة على الدبوس A3 (GPIO1). يتم مسح المقاطعة تلقائيًا بعد 100 ميكروثانية تقريبًا.
عندما تكون البيانات الجديدة جاهزة ، يمكن قراءة النتائج باستخدام الوظيفة vl53l5cx_get_ranging_data (). تقوم بإرجاع بنية محدثة تحتوي على جميع المخرجات المحددة. نظرًا لأن الجهاز غير متزامن ، فلا توجد مقاطعة للمسح لمواصلة جلسة النطاق.
هذه الميزة متاحة لكل من أوضاع النطاق المستمر والمستقل.
باستخدام تنسيق البرامج الثابتة الخام
بعد نقل بيانات النطاق عبر I²C، يوجد تحويل بين تنسيق البرنامج الثابت وتنسيق المضيف. يتم إجراء هذه العملية عادةً على مسافة تتراوح بالملليمتر كمخرج افتراضي للمستشعر. إذا أراد المستخدم استخدام تنسيق البرنامج الثابت، فيجب تحديد الماكرو التالي في النظام الأساسي file: VL53L5CX
#تعريف VL53L5CX_USE_RAW_FORMAT
تفسير النتائج
يمكن تصفية البيانات التي يتم إرجاعها بواسطة VL53L5CX لتأخذ في الاعتبار حالة الهدف. تشير الحالة إلى صحة القياس. يتم وصف قائمة الحالة الكاملة في الجدول التالي.
طاولة 4. قائمة حالة الهدف المتاحة
| حالة الهدف | وصف |
| 0 | لا يتم تحديث البيانات المدى |
| 1 | معدل الإشارة منخفض جدًا على مجموعة SPAD |
| 2 | المرحلة المستهدفة |
| 3 | مقدر سيجما مرتفع للغاية |
| 4 | فشل تناسق الهدف |
| 5 | النطاق صالح |
| 6 | لم يتم تنفيذ الالتفاف (عادةً النطاق الأول) |
| 7 | فشل معدل الاتساق |
| 8 | معدل الإشارة منخفض جدًا بالنسبة للهدف الحالي |
| 9 | النطاق صالح مع نبضة كبيرة (قد يكون بسبب هدف مدمج) |
| 10 | النطاق صالح ، ولكن لم يتم اكتشاف هدف في النطاق السابق |
| 11 | فشل القياس |
| 12 | الهدف غير واضح من قبل شخص آخر ، بسبب المبراة |
| 13 | تم الكشف عن الهدف ولكن البيانات غير متسقة. كثيرا ما يحدث للأهداف الثانوية. |
| 255 | لم يتم اكتشاف هدف (فقط إذا تم تمكين عدد الأهداف المكتشفة) |
للحصول على بيانات متسقة، يحتاج المستخدم إلى تصفية حالة الهدف غير الصالحة. لإعطاء تقييم الثقة، يعتبر الهدف ذو الحالة 5 صالحًا بنسبة 100%. يمكن اعتبار الحالة 6 أو 9 بقيمة ثقة تبلغ 50%. جميع الحالات الأخرى أقل من مستوى الثقة 50%.
أخطاء السائق
عند حدوث خطأ باستخدام المستشعر VL53L5CX، يقوم السائق بإرجاع خطأ محدد. يسرد الجدول التالي الأخطاء المحتملة.
طاولة 5. قائمة الأخطاء المتوفرة باستخدام برنامج التشغيل
| حالة الهدف | وصف |
| 0 | لا يوجد خطأ |
|
127 |
قام المستخدم ببرمجة إعداد غير صحيح
(دقة غير معروفة، تردد النطاق مرتفع جدًا، ...) |
| 255 | خطأ كبير. عادة ما يكون هناك خطأ في المهلة، بسبب خطأ في I²C. |
| آخر | مزيج من عدة أخطاء موصوفة أعلاه |
ملحوظة: يمكن للمضيف تنفيذ المزيد من رموز الخطأ باستخدام النظام الأساسي files.
تاريخ المراجعة
طاولة 6. توثيق تاريخ المراجعة
| تاريخ | إصدار | التغييرات |
| 21 يونيو 2021 | 1 | الإصدار الأولي |
| 30 أغسطس 2021 | 2 | تمت الإضافة القسم 5.4: استخدام تنسيق البرامج الثابتة الخام
تمت إضافة حالة الهدف الجديدة 13 بوصة الجدول 4. قائمة حالة الهدف المتاحة |
| 05-سبتمبر-2022 | 3 | تمت إضافة ملاحظة حول الحد الأدنى للمسافة بين الأهداف القسم 4.10: أهداف متعددة لكل منطقة |
| 10 أغسطس 2023 | 4 | معدل الشكل 11. مثالample المدرج التكراري مع هدفين |
| 21-فبراير-2024 | 5 | تمت إضافة VHV (حجم مرتفع جدًاtagه) إلى القسم 1: المختصرات والمختصرات. تمت الإضافة القسم 4.14: تعويض درجة الحرارة الدورية |
إشعار هام – اقرأ بعناية
تحتفظ شركة STMicroelectronics NV والشركات التابعة لها ("ST") بالحق في إجراء تغييرات وتصحيحات وتعزيزات وتعديلات وتحسينات على منتجات ST و/أو هذه الوثيقة في أي وقت دون إشعار. يجب على المشترين الحصول على أحدث المعلومات ذات الصلة بمنتجات ST قبل تقديم الطلبات. تُباع منتجات ST وفقًا لشروط وأحكام البيع الخاصة بشركة ST السارية وقت إقرار الطلب.
يعتبر المشترون مسؤولين بشكل كامل عن اختيار منتجات ST واختيارها واستخدامها، ولا تتحمل شركة ST أي مسؤولية عن مساعدة التطبيق أو تصميم منتجات المشترين.
لا يتم منح أي ترخيص، صريحًا أو ضمنيًا، لأي حق من حقوق الملكية الفكرية من قبل شركة ST هنا.
إن إعادة بيع منتجات ST بأحكام مختلفة عن المعلومات الواردة هنا يؤدي إلى إبطال أي ضمان تمنحه شركة ST لهذا المنتج.
ST وشعار ST هما علامتان تجاريتان لشركة ST. لمزيد من المعلومات حول العلامات التجارية لشركة ST، راجع www.st.com/trademarks. جميع أسماء المنتجات أو الخدمات الأخرى هي ملك لأصحابها.
تحل المعلومات الواردة في هذه الوثيقة محل المعلومات المقدمة مسبقًا في أي إصدارات سابقة من هذه الوثيقة.
© 2024 STMicroelectronics – جميع الحقوق محفوظة

المستندات / الموارد
 |
STMicroelectronics VL53L5CX مستشعر نطاق الطيران متعدد المناطق [بي دي اف] دليل المستخدم VL53L5CX مستشعر نطاق الطيران متعدد المناطق، VL53L5CX، مستشعر نطاق زمن الطيران متعدد المناطق، مستشعر نطاق وقت الطيران، مستشعر مدى الطيران، مستشعر المدى، المستشعر |



