روبوت ROBOWORKS N10 روبوت تعليمي متنقل قابل للبرمجة

تحديد
| اسم المنتج | نسبة تخفيض المحرك | السرعة القصوى | وزن | الحمولة القصوى | مقاس | الحد الأدنى من نصف قطر الدوران |
|---|---|---|---|---|---|---|
| روبوت 2 | 1:27 | 1.3 متر/ثانية | 5.92كجم | 16 كجم | 445*360*206 ملم | 0.77م |
| روسبوت برو | 1:18 | 1.65 متر/ثانية | 19.54كجم | 35كجم | 774*570*227 ملم | 1.02م |
| روسبوت بلس | 1:18 | 2.33 متر/ثانية | 35.16كجم | 22كجم | 766*671*319 ملم | 1.29م |
عمر البطارية وإمدادات الطاقة:
- الروبوت 2: حوالي 9.5 ساعات (بدون تحميل)، حوالي 8.5 ساعات (مع تحميل كامل)
- روبوت برو: حوالي 4.5 ساعات (بدون تحميل)، حوالي 3 ساعات (مع تحميل كامل)
- مصدر الطاقة: بطارية 24 فولت 6000 مللي أمبير + شاحن ذكي تيار 3 أمبير
نظام التوجيه والقيادة:
تتضمن المكونات الرئيسية ما يلي:
- ترس التوجيه: سيرفو رقمي S20F عزم دوران 20 كجم
- العجلات: سيرفو رقمي WH060 بعزم دوران 60 كجم، عجلات مطاطية صلبة بقطر 125 مم لـ Rosbot 2، عجلات مطاطية صلبة بقطر 150 مم لـ Robot Pro و
- المشفر: مشفر عالي الدقة بمرحلة AB مكون من 500 سطر
- نظام التعليق: نظام تعليق بندولي محوري للروبوت 2، ونظام تعليق مستقل 4 وات للروبوت المحترف و
- واجهة التحكم: تطبيق iOS وAndroid عبر البلوتوث أو الواي فاي، PS2، CAN، المنفذ التسلسلي، USB
مقدمة عن وحدات تحكم ROS:
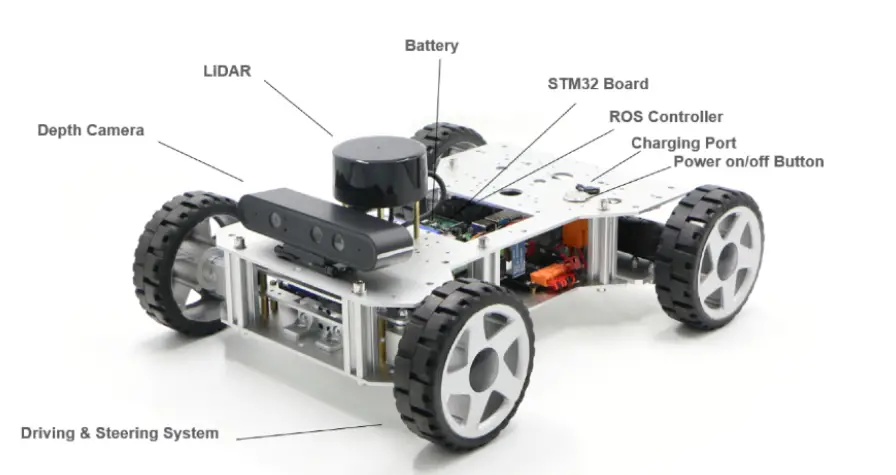
تم تجهيز جميع روبوتات RRobots بكاميرا Orbbec Astra Depth لاستخدامات مختلفة بما في ذلك التحكم بالإيماءات وتتبع الهيكل العظمي والمسح الضوئي ثلاثي الأبعاد.
مجلس STM32:
تتميز اللوحة بنواة STM32F103RC مع وظائف مختلفة بما في ذلك الذكريات والساعة وإعادة الضبط وإدارة الإمداد وPower DMA ووضع التصحيح ومنافذ الإدخال/الإخراج والمؤقتات وواجهة الاتصال.
الأسئلة الشائعة
س: كيف أقوم بشحن البطارية؟
أ: استخدم الشاحن الذكي المزود بتيار 3 أمبير مع بطارية 24 فولت 6000 مللي أمبير في الساعة لشحن RRobot
س: ما هي عمر بطارية Rosbot Pro؟
ج: يتمتع Robot Pro بعمر بطارية يصل إلى حوالي 4.5 ساعات بدون تحميل وحوالي 3 ساعات في ظروف التحميل الكامل.
س: هل يمكنني التحكم في Rosbot باستخدام الهاتف الذكي؟
ج: نعم، يمكنك التحكم في Rosbot باستخدام تطبيق iOS وAndroid عبر البلوتوث أو الواي فاي.
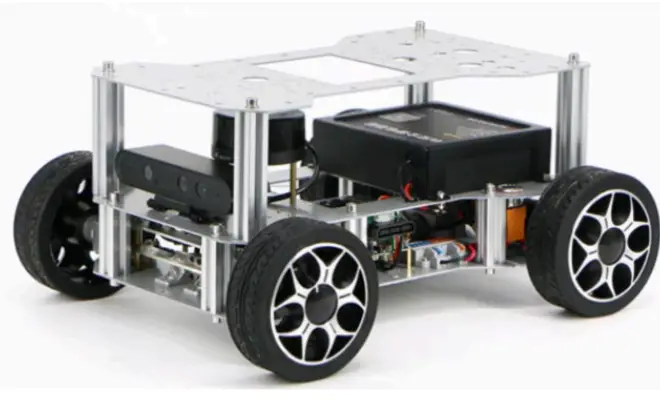
المكون الرئيسي
| متغيرات | صورة |
| روبوت 2 | 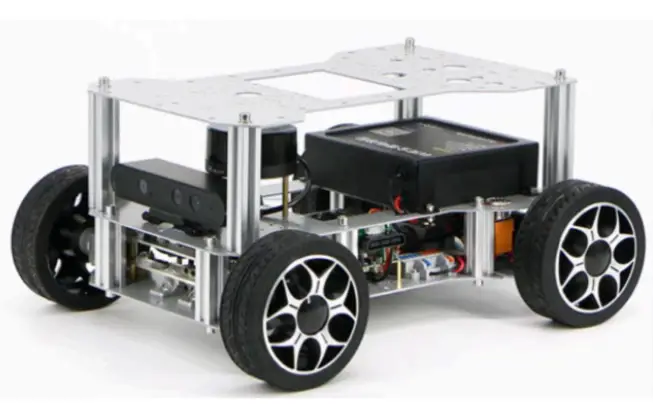 |
| روبوت برو |  |
| روبوت بلس |  |
مواصفات المنتج
|
مصفوفة المنتج |
 |
 |
 |
| اسم المنتج | روبوت 2 | روبوت برو | روبوت بلس |
| نسبة تخفيض المحرك | 1:27 | 1:18 | 1:18 |
| السرعة القصوى | 1.3 متر/ثانية | 1.65 متر/ثانية | 2.33 متر/ثانية |
| وزن | 5.92كجم | 19.54كجم | 35.16كجم |
| الحمولة القصوى | 16 كجم | 35كجم | 22كجم |
| مقاس | 445*360*206 ملم | 774*570*227 ملم | 766*671*319 ملم |
| الحد الأدنى من نصف قطر الدوران | 0.77م | 1.02م | 1.29م |
| عمر البطارية | حوالي 9.5 ساعات (بدون تحميل) ، حوالي 8.5 ساعات (حمولة كاملة) | حوالي 4.5 ساعات (بدون تحميل) ، حوالي 3 ساعات (حمولة كاملة) | |
| مزود الطاقة | بطارية 24 فولت 6000 مللي أمبير + شاحن ذكي تيار 3 أمبير | ||
| عجلة التوجيه | سيرفو رقمي S20F عزم دوران 20 كجم | WH060 مضاعفات رقمية عزم الدوران 60 كجم | |
| عجلات | 125 ملم عجلات مطاطية صلبة | 150 ملم عجلات مطاطية صلبة | عجلات مطاطية قابلة للنفخ 254 ملم |
| مُشفّر | جهاز ترميز عالي الدقة ذو 500 خط AB | ||
| نظام التعليق | نظام تعليق البندول المحوري | 4W نظام تعليق مستقل | |
| واجهة التحكم | تطبيق iOS و Android عبر Bluetooth أو Wifi ، PS2 ، CAN ، المنفذ التسلسلي ، USB | ||
تقديم وحدات تحكم ROS
يتوفر نوعان من وحدات التحكم ROS للاستخدام مع الروبوت RRobot المستند إلى منصة Vidia Jetson. يُعد Jetson Orin Nano أكثر ملاءمة للبحث والتعليم. يُعد Jetson Orin NX مثاليًا للنماذج الأولية للمنتجات والتطبيقات التجارية. يوضح الجدول التالي الاختلافات الفنية الرئيسية بين وحدات التحكم المختلفة المتوفرة من Roboworks. تسمح كلتا اللوحتين بالحوسبة عالية المستوى ومناسبة للتطبيقات الروبوتية المتقدمة مثل الرؤية الحاسوبية والتعلم العميق وتخطيط الحركة.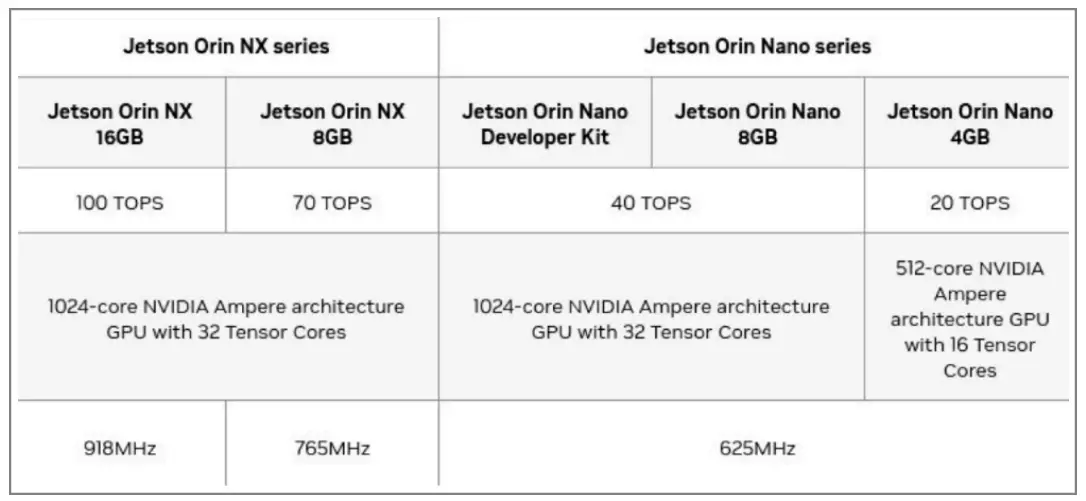
نظام الاستشعار: LiDAR & Depth Camera
تم تركيب جهاز Leishen LSLiDAR على جميع إصدارات Rosbot باستخدام إما طراز N10 أو M10. يوفر جهاز LLiDAR هذا مسحًا بزاوية 3360-3360 درجة وإدراكًا للمحيط ويتميز بـ ESI صغير الحجم وخفيف الوزن. يتمتع بنسبة ضوضاء إشارة عالية وأداء اكتشاف ممتاز للأجسام العاكسة العالية/المنخفضة ويعمل بشكل جيد في ظروف الإضاءة القوية. يتمتع بنطاق اكتشاف يبلغ 30 مترًا وتردد مسح 12 هرتز. يتكامل جهاز LiDAR هذا بسلاسة مع الروبوتات، مما يضمن إمكانية تحقيق جميع استخدامات رسم الخرائط والملاحة بسهولة في مشروعك. يلخص الجدول أدناه المواصفات الفنية للمزالج: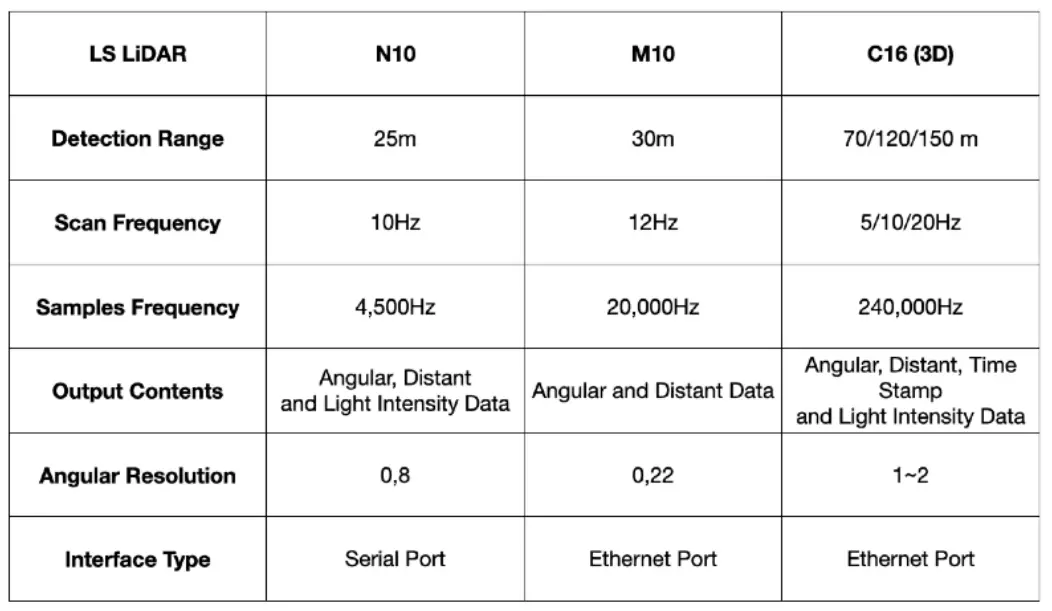
بالإضافة إلى ذلك، تم تجهيز جميع الروبوتات بكاميرا Orbbec Astra Depth، وهي كاميرا RGBD. تم تحسين هذه الكاميرا لمجموعة من الاستخدامات بما في ذلك التحكم بالإيماءات وتتبع الهيكل والمسح ثلاثي الأبعاد وتطوير السحابة النقطية. يلخص الجدول التالي الميزات الفنية لكاميرا العمق.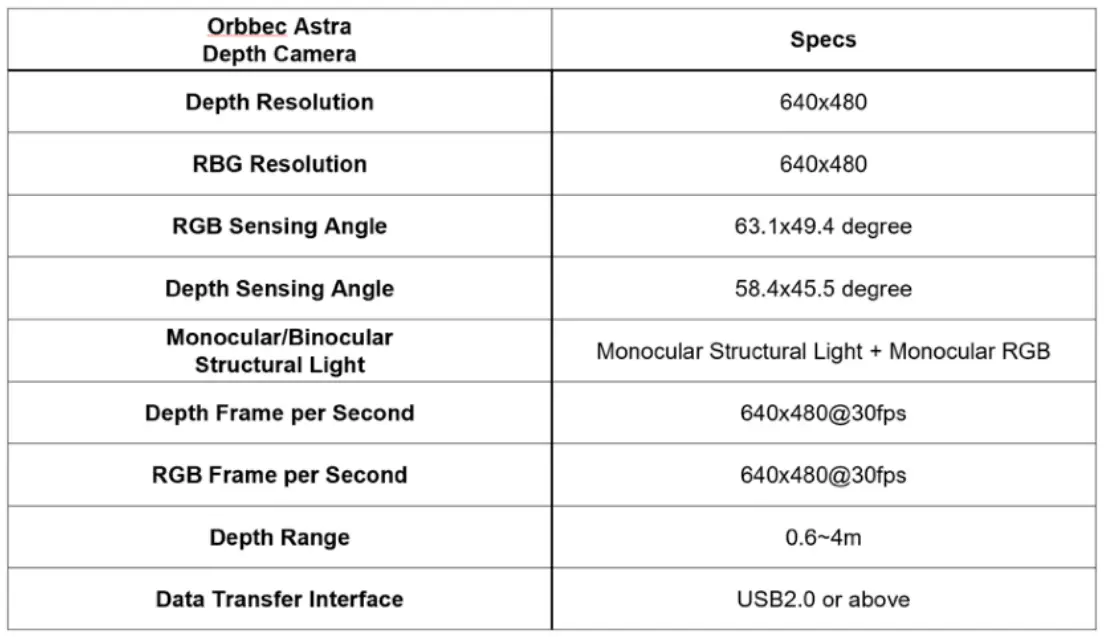
لوحة STM32 (التحكم في المحرك ، إدارة الطاقة و IMU)
لوحة STM32F103RC هي المتحكم الدقيق المستخدم في جميع روبوتات Rosbots. تحتوي على نواة RISC عالية الأداء ARM Cortex-M3 32 بت تعمل بتردد 72 ميجا هرتز إلى جانب ذاكرة مدمجة عالية السرعة. تعمل في نطاق درجة حرارة من -40 درجة مئوية إلى +105 درجة مئوية، مما يناسب جميع تطبيقات الروبوتات في المناخات العالمية. هناك أوضاع توفير الطاقة التي تسمح بتصميم تطبيقات منخفضة الطاقة. تشمل بعض تطبيقات هذا المتحكم الدقيق محركات السيارات والتحكم في التطبيقات والتطبيقات الروبوتية والمعدات الطبية والمحمولة وأجهزة الكمبيوتر الشخصية والألعاب ومنصات GPS والتطبيقات الصناعية وأجهزة الاتصال الداخلي عبر الفيديو لأنظمة الإنذار والماسحات الضوئية.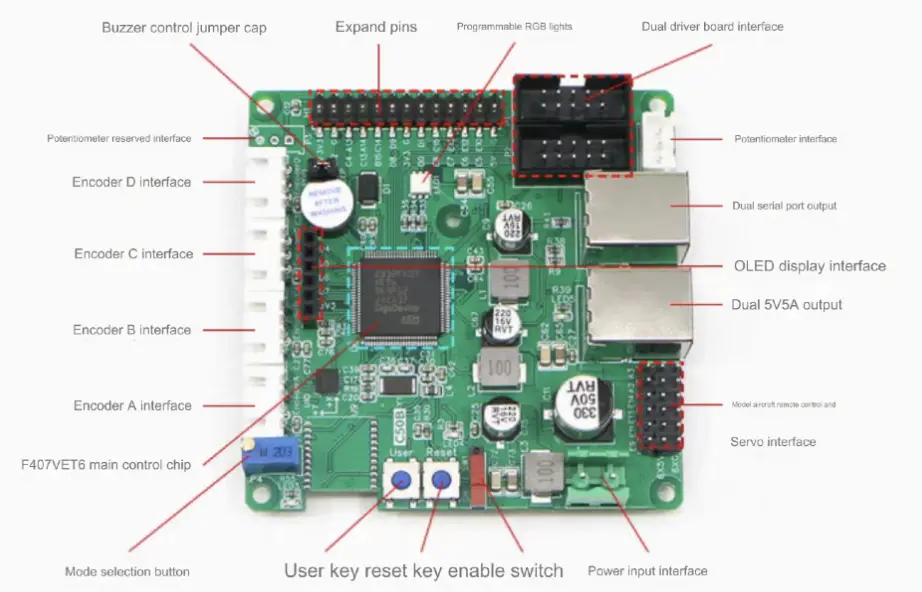
| STM32F103RC | سمات |
| جوهر | ARM32-bit Cortex –M3 CPU السرعة القصوى 72 ميجا هرتز |
| ذكريات | 512 كيلو بايت من ذاكرة فلاش 64 كيلو بايت من SRAM |
| إدارة الساعة وإعادة الضبط والإمداد | 2.0 إلى 3.6 V توريد التطبيقات و I / Os |
|
قوة |
أوضاع السكون والتوقف والاستعداد
توريد V لسجلات RTC والنسخ الاحتياطي الخفاش |
| DMA | وحدة تحكم DMA ذات 12 قنوات |
| وضع التصحيح | SWD و JTAG واجهات Cortex-M3 Embedded Trace Macrocell |
| منافذ الإدخال والإخراج | 51 منفذ إدخال / إخراج (يمكن تعيينها على 16 متجهًا خارجيًا للمقاطعة و 5 فولت متسامح) |
|
المؤقتات |
مؤقتات 4 × 16 بت
مؤقتات PWM 2 × 16 بت للتحكم في المحرك (مع التوقف في حالات الطوارئ) 2 × مؤقتات مراقبة (مستقلة ومنبثقة) ومؤقت SysTick (عداد تنازلي 24 بت) 2 × 16 بت مؤقتات أساسية لقيادة DAC |
|
واجهة الاتصال |
واجهة USB 2.0 كاملة السرعة واجهة SDIO
واجهة CAN (2.0B نشط) |
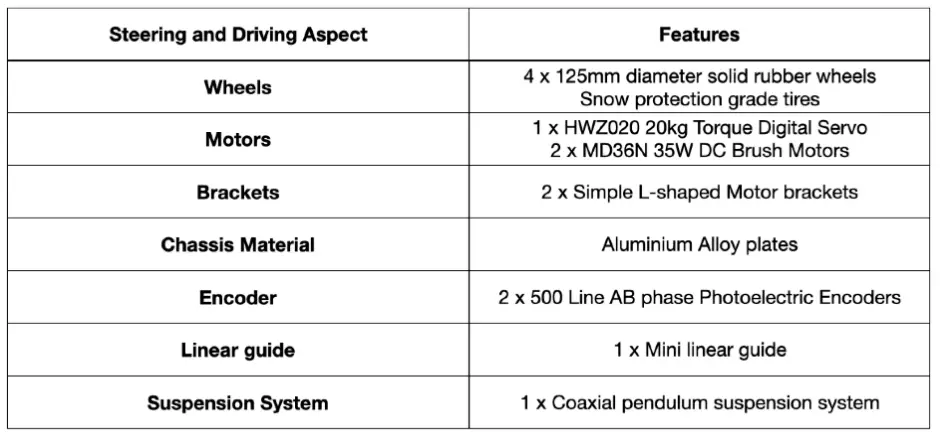
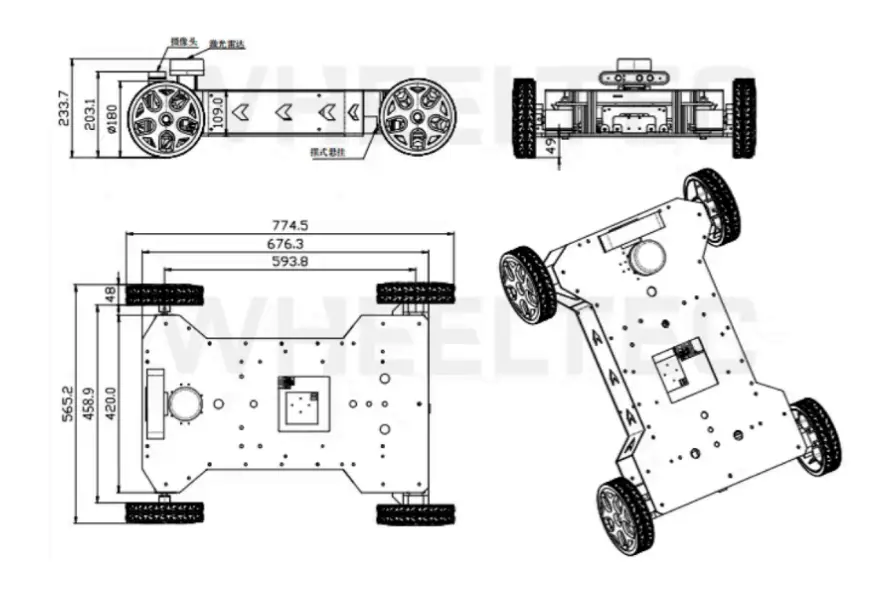
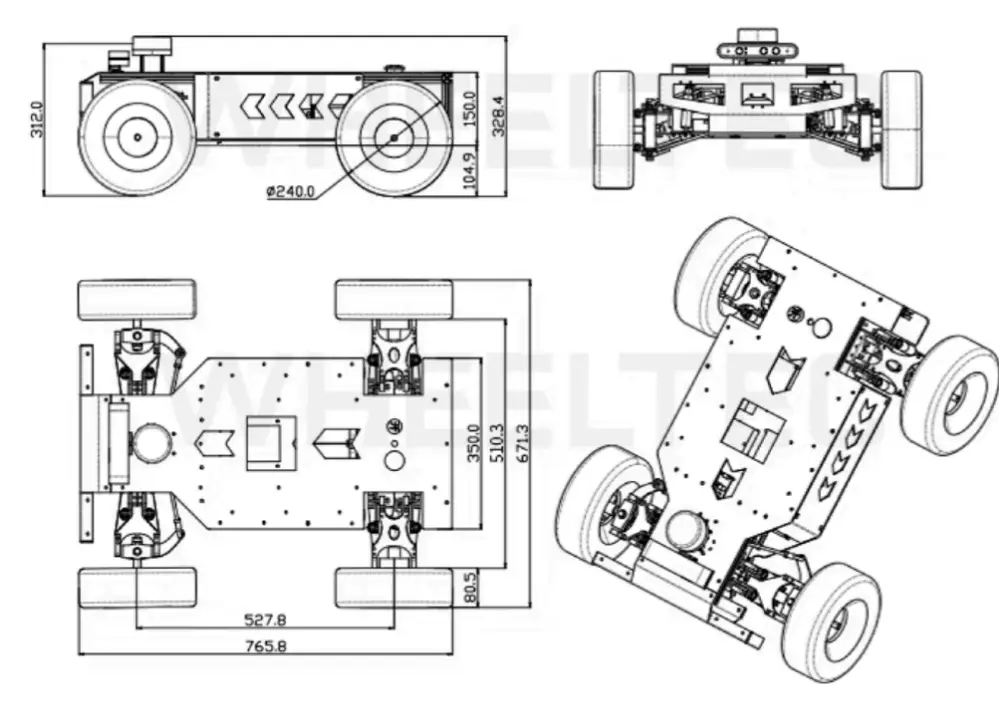
نظام التوجيه والقيادة
تم دمج نظام التوجيه والقيادة مع تصميم وبناء الروبوت. اعتمادًا على الطراز الذي تم شراؤه، سيكون إما بنظام دفع ثنائي العجلات أو رباعي العجلات، حيث يكون كلا الخيارين مناسبين لمجموعة متنوعة من أغراض البحث والتطوير. العجلات في جميع الروبوتات مصنوعة من المطاط الصلب مع إطارات بدرجة حماية من الثلوج. يوجد نظام تعليق بندولي متحد المحور، ومجموعة الروبوتات مجهزة بامتصاص الصدمات مع أنظمة تعليق مستقلة، مما يضمن قدرتها على التنقل بنجاح في التضاريس الصعبة.
المواصفات الفنية للتوجيه والقيادة:
مخطط تصميم هيكل الروبوت:
روبوت 2

روبوت برو
روبوت بلس
إدارة الطاقة
باور ماج – بطارية LFP المغناطيسية:
تأتي جميع بطاريات Rosbots مع Power Mag بسعة 6000 مللي أمبير في الساعة وبطارية مغناطيسية LFP (فوسفات الليثيوم والحديد) وشاحن طاقة. يمكن للعملاء ترقية البطارية إلى 20000 مللي أمبير في الساعة بتكلفة إضافية. بطاريات LFP هي نوع من بطاريات الليثيوم أيون المعروفة بثباتها وسلامتها وعمر دورة حياة طويل. على عكس بطاريات الليثيوم أيون التقليدية، التي تستخدم الكوبالت أو النيكل، تعتمد بطاريات LFP على فوسفات الحديد، مما يوفر بديلاً أكثر استدامة وأقل سمية. إنها مقاومة للغاية للهروب الحراري، مما يقلل من خطر ارتفاع درجة الحرارة والحرائق. في حين أن كثافة الطاقة لديها أقل مقارنة ببطاريات الليثيوم أيون الأخرى، فإن بطاريات LFP تتميز بالمتانة، مع عمر أطول وشحن أسرع وأداء أفضل في درجات الحرارة القصوى، مما يجعلها مثالية للسيارات الكهربائية وأنظمة تخزين الطاقة. يمكن ربط Power Mag بأي سطح معدني للروبوت بسبب تصميم قاعدته المغناطيسية. إنه يجعل تبديل البطاريات سريعًا وسهلاً.
المواصفات الفنية:
| نموذج | 6000 مللي أمبير | 20000 مللي أمبير |
| حزمة البطارية |
22.4 فولت 6000 مللي أمبير |
22.4 فولت 20000 مللي أمبير |
|
المواد الأساسية |
فوسفات الحديد الليثيوم |
فوسفات الحديد الليثيوم |
| قطع المجلدtage | 16.5 فولت | 16.5 فولت |
|
المجلد الكاملtage |
25.55 فولت |
25.55 فولت |
| تيار الشحن | 3A | 3A |
| مادة الغلاف |
معدن |
معدن |
| أداء التفريغ | 15 أمبير تفريغ مستمر | 20 أمبير تفريغ مستمر |
|
سدادة |
موصل أنثى DC4017MM (شحن) موصل أنثى XT60U-F (تفريغ) |
موصل أنثى DC4017MM (شحن) موصل أنثى XT60U-F (تفريغ) |
|
مقاس |
177*146*42 ملم |
208*154*97 ملم |
|
وزن |
1.72كجم |
4.1كجم |
حماية البطارية
حماية من ماس كهربائي، تيار زائد، شحن زائد، تفريغ زائد، دعم الشحن أثناء الاستخدام، صمام أمان مدمج، لوحة مقاومة للهب.
محطة الشحن التلقائي (Power+):
يتم تضمين محطة الشحن التلقائي مع طراز Rosbot 2+ ويمكن شراؤها بشكل منفصل للعمل مع Rosbot 2 وRosbot Pro وRosbot Plus.
البدء السريع في ROS 2
عند تشغيل الروبوت لأول مرة، يتم التحكم فيه بواسطة ROS افتراضيًا. وهذا يعني أن لوحة تحكم الهيكل STM32 تقبل الأوامر من وحدة تحكم ROS 2 - Jetson Orin. الإعداد الأولي سريع وسهل، من جهاز الكمبيوتر المضيف الخاص بك (يوصى باستخدام Ubuntu Linux) اتصل بنقطة اتصال Wi-Fi الخاصة بالروبوت. كلمة المرور افتراضيًا هي "Dongguan". بعد ذلك، اتصل بالروبوت باستخدام SSH عبر Linuxterminatee l، عنوان P هو 192.168.0.10 و 0، وكلمة المرور الافتراضية هي Dongguan.
مع إمكانية الوصول إلى الروبوت من خلال المحطة الطرفية، يمكنك الانتقال إلى مجلد مساحة عمل ROS 2، ضمن "wheeltec_ROS 2". قبل تشغيل برامج الاختبار، انتقل إلى wheeltec_ROS 2/turn_on_wheeltec_robot/ وحدد موقع wheeltec_udev.sh - يجب تشغيل هذا البرنامج النصي، عادةً مرة واحدة فقط لضمان التكوين الصحيح للأجهزة الطرفية. يمكنك الآن اختبار وظائف الروبوت، لتشغيل وظائف وحدة التحكم ROS 2، قم بتشغيل: "relaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch"
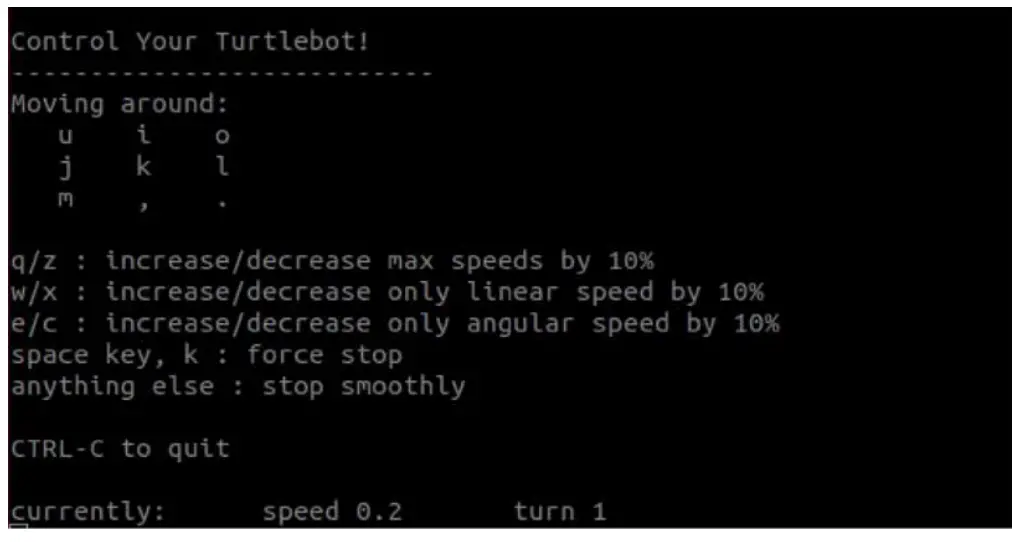
في محطة طرفية ثانية، يمكنك استخدام عقدة keyboard_teleop للتحقق من صحة التحكم في الهيكل، وهي نسخة معدلة من ROS 2 Turtlebot ex الشهيرampالنوع: "relaunch wheeltec_robot_rc keyboard_teleop.launch"
حزم Humble المثبتة مسبقًا لنظام التشغيل ROS 2
فيما يلي الحزم الموجهة للمستخدم، في حين قد تكون هناك حزم أخرى موجودة، إلا أنها تعتمد على التبعيات فقط.
- تشغيل الروبوت Wheeltec
تعتبر هذه الحزمة ضرورية لتمكين وظائف الروبوت والتواصل مع وحدة التحكم في الهيكل. يجب استخدام البرنامج النصي الأساسي "turn_on_wheeltec_robot.launch" عند كل عملية تمهيد لتكوين ROS 2 ووحدة التحكم. - عجلة تيك_rviz2
يحتوي على الإطلاق files لتشغيل viz باستخدام تكوين مخصص لـ Pickerbot Pro. - عجلة_التقنية_روبوت_سلام
حزمة تعيين وتوطين SLAM مع تكوين مخصص لـ Pickerbot Pro. - روبوت ويلتيك_rrt2
استكشاف خوارزمية الشجرة العشوائية بسرعة - تتيح هذه الحزمة لـ Pickerbot Pro تخطيط مسار إلى الموقع المطلوب، عن طريق تشغيل عقد الاستكشاف. - لوحة مفاتيح روبوتية من شركة Wheeltec
حزمة ملائمة للتحقق من وظائف الروبوت والتحكم فيه باستخدام لوحة المفاتيح، بما في ذلك من جهاز الكمبيوتر المضيف البعيد. - عجلة القيادة_روبوت_الملاحة2
حزمة عقدة ROS 2 Navigation 2. - عجلة القيادة_ليدار_روس2
حزمة ROS 2 Lidar لتكوين Leishen M10/N10. - عجلة_التقنية_الفرح
تحتوي حزمة التحكم في عصا التحكم على الإطلاق files لعقدة عصا التحكم. - متابع بسيط_ros2
خوارزميات أساسية لتتبع الكائنات والخطوط باستخدام إما المسح الضوئي بالليزر أو كاميرا العمق. - كاميرا ros2_astra
حزمة كاميرا عمق أسترا مع برامج التشغيل والإطلاق files.
ملخص
تم تصميم الروبوت لمطوري نظام تشغيل الروبوت (ROS) والمعلمين والطلاب. يتمثل جوهر Rosbot في إطار عمل برمجي قابل للبرمجة بالكامل وهندسة أجهزة قابلة للتكوين استنادًا إلى منصة الروبوتات الأكثر شهرة - ROS.
يأتي الروبوت في ثلاث فئات:
- روبوت 2 – مناسب للمبتدئين في ROS والمشاريع ذات الميزانية المنخفضة.
- روبوت برو – مناسب لمطوري ROS والمعلمين الذين يحتاجون إلى نظام متعدد الاستخدامات للنماذج الأولية السريعة أو التدريس.
- روسبوت بلس - هذه هي النسخة ذات الدفع الرباعي من Rosbot مع أنظمة التعليق المستقلة. هذه الفئة خطيرة بما يكفي للنظر فيها للتطوير الصناعي والتجاري. يأتي الروبوت مع وحدات تحكم ROS الشهيرة مثل:
- جيتسون أورين نانو
- جيتسون أورين NX
أعدت بواسطة: واين ليو، رايلي سميثرز وتارا هيرز 30 سبتمبر 2024
إصدار #: 20240930
المستندات / الموارد
 |
روبوت ROBOWORKS N10 روبوت تعليمي متنقل قابل للبرمجة [بي دي اف] دليل المستخدم روبوت N10 روبوت متحرك تعليمي قابل للبرمجة، N10، روبوت متحرك تعليمي قابل للبرمجة، روبوت متحرك تعليمي قابل للبرمجة، روبوت متحرك قابل للبرمجة، روبوت متحرك، روبوت |