وحدة الاتصال المدمجة Fronius RI MOD

تحديد
- اسم المنتج: RI FB PRO/i RI MOD/i CC Ethernet/IP-2P
- بائع: شركة فرونيوس الدولية المحدودة
- نوع الجهاز: محول الاتصالات
- رمز المنتج: 0320هيكس (800ديز)
- نوع الصورة: الصورة القياسية
- نوع المثيل: إنتاج المثيل
- حالة الاستهلاك: حالة الاستهلاك
- اسم المثيل: فرونيوس-FB-Pro-EtherNetIP(TM)
تعليمات استخدام المنتج
ضبط عنوان IP لوحدة الناقل
يمكن ضبط عنوان IP لوحدة الناقل باستخدام مفاتيح DIP الموجودة على الواجهة:
- قم بتعيين عنوان IP ضمن النطاق 192.168.0.xx (حيث يتوافق xx مع مواضع مفتاح DIP من 1 إلى 63).
- إعدادات مفتاح DIP وعناوين IP المقابلة:
| مفتاح DIP | عنوان IP |
|---|---|
| إيقاف إيقاف إيقاف إيقاف إيقاف إيقاف إيقاف تشغيل | 1 |
| إيقاف إيقاف إيقاف إيقاف إيقاف إيقاف تشغيل إيقاف تشغيل إيقاف تشغيل إيقاف تشغيل إيقاف تشغيل | 2 |
| إيقاف إيقاف إيقاف إيقاف إيقاف إيقاف تشغيل تشغيل تشغيل | 3 |
| تشغيل على تشغيل إيقاف التشغيل | 62 |
| على على على على على على على | 63 |
أنواع البيانات وتعيين الإشارات
يستخدم المنتج أنواع البيانات التالية:
- UINT16 (عدد صحيح غير موقّع) – النطاق: من 0 إلى 65535
- SINT16 (عدد صحيح موقّع) – النطاق: من -32768 إلى 32767
تعيين العنوان لإشارات الإدخال والإخراج:
| عنوان | يكتب | وصف |
|---|---|---|
| 0-7 | إشارة BIT | تفاصيل تعيين الإشارة |
عام
أمان
تحذير!
خطر من التشغيل غير الصحيح والعمل الذي لا يتم تنفيذه بشكل صحيح. يمكن أن يؤدي ذلك إلى إصابة شخصية خطيرة وإلحاق أضرار بالممتلكات.
- يجب أن يتم تنفيذ جميع الأعمال والوظائف الموصوفة في هذه الوثيقة فقط بواسطة موظفين مدربين تقنيًا ومؤهلين.
- اقرأ وافهم هذه الوثيقة بالكامل.
- اقرأ وافهم جميع قواعد السلامة ووثائق المستخدم الخاصة بهذا الجهاز وجميع مكونات النظام.
اتصالات ويعرض
| 1 | تكس+ |
| 2 | تكساس- |
| 3 | ار اكس+ |
| 6 | آر إكس- |
| 4,5,7, | لا يتم استخدامه عادة؛ للتأكد من- |
| 8 | بخصوص اكتمال الإشارة، |
| يجب أن تكون دبابيس هذه مترابطة | |
| مرتبط وبعد المرور | |
| من خلال دائرة التصفية، يجب | |
| تنتهي عند الأرض | |
| موصل (PE). |
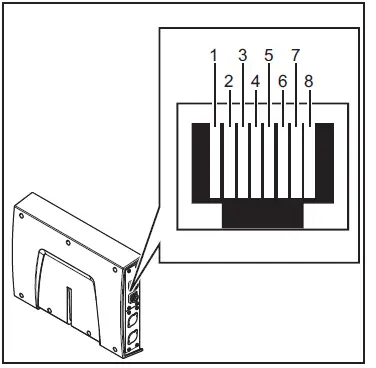
اتصال RJ45
| (1) LED MS – حالة الوحدة |
| عن:
لا يوجد مجلد العرضtage |
| يضيء باللون الأخضر:
يتم التحكم بها بواسطة سيد |
| يومض باللون الأخضر (مرة واحدة):
لم يتم تكوين الجهاز الرئيسي أو الجهاز الرئيسي خامل |
| يضيء باللون الأحمر:
خطأ كبير (حالة استثناء، خطأ خطير، ...) |
| يومض باللون الأحمر:
خطأ قابل للتصحيح |
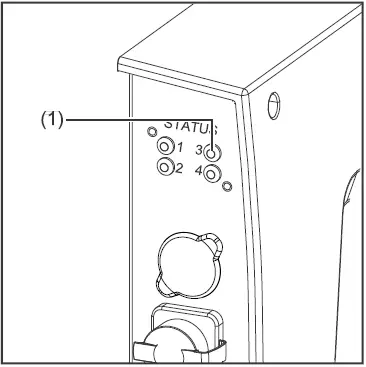
| (2) LED NS – حالة الشبكة |
| عن:
لا يوجد مجلد العرضtagالبريد أو عدم وجود عنوان IP |
| يضيء باللون الأخضر:
متصل بالإنترنت، تم إنشاء اتصال واحد أو أكثر (فئة CIP 1 أو 3) |
| يومض باللون الأخضر:
متصل بالإنترنت، لم يتم إنشاء اتصال |
| يضيء باللون الأحمر:
عنوان IP مزدوج، خطأ خطير |
| يومض باللون الأحمر:
تجاوز الوقت لاتصال واحد أو أكثر (فئة CIP 1 أو 3) |
خصائص نقل البيانات
نقل التكنولوجيا
- إيثرنت
واسطة
- عند اختيار الكابلات والمقابس، يجب مراعاة توصية ODVA للتخطيط وتركيب أنظمة EtherNet/IP. تم إجراء اختبارات التوافق الكهرومغناطيسي بواسطة الشركة المصنعة باستخدام الكابل IE-C5ES8VG0030M40M40-F.
سرعة الإرسال
- 10 ميجابت / ثانية أو 100 ميجابت / ثانية
اتصال الحافلة
- إيثرنت RJ-45 / M12
معلمات التكوين
- في بعض أنظمة التحكم في الروبوت، قد يكون من الضروري تحديد معلمات التكوين الموضحة هنا حتى تتمكن وحدة الحافلة من التواصل مع الروبوت.
| المعلمة | قيمة | وصف |
| بائع ID | 0534 سداسي عشري (1332 ديسمبر) | شركة فرونيوس الدولية المحدودة |
| نوع الجهاز | 000Chex (12ديسمبر) | محول الاتصالات |
| رمز المنتج | 0320 سداسي عشري (800 ديسمبر) | فرونيوس إف بي برو إيثرنت/IP-2-Port |
اسم المنتج Fronius-FB-Pro-EtherNetIP(TM)
|
نوع الصورة |
نوع الطلب |
اسم المثيل |
مثال وصف |
رقم المثيل |
الحجم [بايت] |
| الصورة القياسية | مثال على الإنتاج القادم | معيار إدخال البيانات | البيانات من مصدر الطاقة إلى الروبوت | 100 | 40 |
|
نوع الصورة |
نوع الطلب |
اسم المثيل |
مثال وصف |
رقم المثيل |
الحجم [بايت] |
| مثال استهلاكي | معيار بيانات الإخراج | البيانات من الروبوت إلى مصدر الطاقة | 150 | 40 | |
| صورة الاقتصاد | مثال على الإنتاج القادم | معيار إدخال البيانات | البيانات من مصدر الطاقة إلى الروبوت | 101 | 16 |
| مثال استهلاكي | معيار بيانات الإخراج | البيانات من الروبوت إلى مصدر الطاقة | 151 | 16 |
ضبط عنوان IP لوحدة الناقل
تعيين عنوان IP لوحدة الناقل يمكنك تعيين عنوان IP لوحدة الناقل على النحو التالي:
- استخدام مفتاح DIP في الواجهة ضمن النطاق المحدد بواسطة 192.168.0.xx (xx = إعداد مفتاح DIP = 1 إلى 63)
- يتم ضبط جميع المواضع على وضع إيقاف التشغيل في المصنع. في هذه الحالة، يجب ضبط عنوان IP على webموقع ماكينة اللحام
- على webموقع آلة اللحام (إذا تم ضبط جميع مواضع مفتاح DIP على وضع إيقاف التشغيل)
يتم ضبط عنوان IP باستخدام مواضع مفتاح DIP من 1 إلى 6. يتم إجراء التكوين بتنسيق ثنائي. وينتج عن هذا نطاق تكوين يتراوح من 1 إلى 63 بتنسيق عشري.
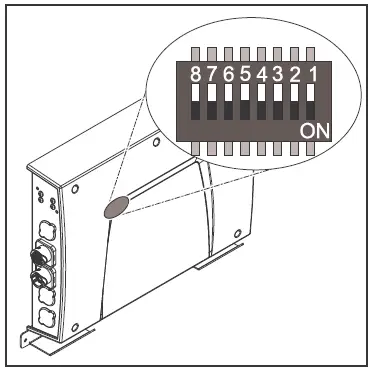
| Example ل جلسة ال IP عنوان من وحدة الحافلة باستخدام مفتاح DIP في الواجهة: | ||||||||
| مفتاح تراجع | ||||||||
| 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | عنوان IP |
| - | - | عن | عن | عن | عن | عن | ON | 1 |
| - | - | عن | عن | عن | عن | ON | عن | 2 |
| - | - | عن | عن | عن | عن | ON | ON | 3 |
| - | - | ON | ON | ON | ON | ON | عن | 62 |
| - | - | ON | ON | ON | ON | ON | ON | 63 |
تعليمات لضبط عنوان IP على webموقع آلة اللحام:
قم بتدوين عنوان IP الخاص بآلة اللحام المستخدمة:
- في لوحة التحكم الخاصة بآلة اللحام، حدد "الإعدادات الافتراضية"
- في لوحة التحكم الخاصة بآلة اللحام، حدد "النظام"
- في لوحة التحكم الخاصة بآلة اللحام، حدد "المعلومات"
- قم بتدوين عنوان IP المعروض (على سبيل المثالampجنيه: 10.5.72.13)
الوصول إلى webموقع ماكينة اللحام في متصفح الانترنت:
- ربط الكمبيوتر بشبكة ماكينة اللحام
- أدخل عنوان IP الخاص بآلة اللحام في شريط البحث في متصفح الإنترنت وقم بالتأكيد
- أدخل اسم المستخدم القياسي (admin) وكلمة المرور (admin)
- ال webيتم عرض موقع مصدر الطاقة
تعيين عنوان IP لوحدة الحافلة:
- على آلة اللحام بالطاقة، حدد علامة التبويب "RI FB PRO/i"
- أدخل عنوان IP المطلوب للواجهة ضمن "تكوين الوحدة". على سبيل المثالampجنيه: 192.168.0.12
- حدد "تعيين التكوين"
- حدد "إعادة تشغيل الوحدة"
- تم تطبيق عنوان IP المحدد
إشارات الإدخال والإخراج
أنواع البيانات
يتم استخدام أنواع البيانات التالية:
- UINT16 (عدد صحيح غير موقّع)
- العدد الكامل في النطاق من 0 إلى 65535
- SINT16 (عدد صحيح موقّع)
- يتراوح العدد الكامل من -32768 إلى 32767
التحويل على سبيل المثالampليه:
- لقيمة موجبة (SINT16) على سبيل المثال سرعة السلك المطلوبة x عامل 12.3 م/دقيقة x 100 = 1230dec = 04CEhex
- لقيمة سلبية (SINT16) على سبيل المثال، تصحيح القوس x عامل -6.4 × 10 = -64dec = FFC0hex
توفر إشارات الإدخال
تتوفر إشارات الإدخال المدرجة أدناه من البرنامج الثابت V2.0.0 لجهاز RI FB PRO/i فصاعدًا.
إشارات الإدخال (من الروبوت إلى مصدر الطاقة)
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل | صورة العملية | ||||
|
نسبي |
مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
0 |
0 |
0 | 0 | بداية اللحام | زيادة الغناء |
ü |
ü |
||
| 1 | 1 | الروبوت جاهز | عالي | ||||||
| 2 | 2 | وضع العمل بت 0 | عالي |
انظر الجدول قيمة يتراوح ل عمل وضع على الصفحة 35 |
|||||
| 3 | 3 | وضع العمل بت 1 | عالي | ||||||
| 4 | 4 | وضع العمل بت 2 | عالي | ||||||
| 5 | 5 | وضع العمل بت 3 | عالي | ||||||
| 6 | 6 | وضع العمل بت 4 | عالي | ||||||
| 7 | 7 | — | |||||||
|
1 |
0 | 8 | تشغيل الغاز | زيادة الغناء | |||||
| 1 | 9 | سلك للأمام | زيادة الغناء | ||||||
| 2 | 10 | سلك للخلف | زيادة الغناء | ||||||
| 3 | 11 | خطأ في الخروج | زيادة الغناء | ||||||
| 4 | 12 | استشعار اللمس | عالي | ||||||
| 5 | 13 | إنطفاء الشعلة | زيادة الغناء | ||||||
| 6 | 14 | معالجة اختيار البت 0 | عالي | انظر الجدول قيمة نطاق العملية لا يوجد اختيارn على الصفحة 36 | |||||
|
7 |
15 |
معالجة اختيار البت 1 |
عالي |
||||||
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل | صورة العملية | ||||
|
نسبي |
مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
1 |
2 |
0 | 16 | محاكاة اللحام | عالي |
ü |
ü |
||
|
1 |
17 |
عملية اللحام MIG/MAG: 1)
نبضة متزامنة على |
عالي |
||||||
| عملية اللحام WIG: 2)
TAC على |
عالي |
||||||||
|
2 |
18 |
عملية اللحام WIG: 2)
تشكيل الغطاء |
عالي |
||||||
| 3 | 19 | — | |||||||
| 4 | 20 | — | |||||||
| 5 | 21 | دليل التعزيز | عالي | ||||||
| 6 | 22 | سلك الفرامل على | عالي | ||||||
| 7 | 23 | تبادل الشعلة | عالي | ||||||
|
3 |
0 | 24 | — | ||||||
| 1 | 25 | وضع التدريس | عالي | ||||||
| 2 | 26 | — | |||||||
| 3 | 27 | — | |||||||
| 4 | 28 | — | |||||||
| 5 | 29 | سلك منذ البداية | زيادة الغناء | ||||||
| 6 | 30 | انقطاع استشعار الأسلاك | زيادة الغناء | ||||||
| 7 | 31 | — | |||||||
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل | صورة العملية | ||||
|
نسبي |
مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
2 |
4 |
0 | 32 | وضع التوأم بت 0 | عالي | انظر الجدول قيمة مدى TWIN وضع على الصفحة 36 |
ü |
ü |
|
|
1 |
33 |
وضع التوأم بت 1 |
عالي |
||||||
| 2 | 34 | — | |||||||
| 3 | 35 | — | |||||||
| 4 | 36 | — | |||||||
|
5 |
37 |
وضع التوثيق |
عالي |
انظر الجدول قيمة نطاق للوثائق وضع التفكير على الصفحة 36 | |||||
| 6 | 38 | — | |||||||
| 7 | 39 | — | |||||||
|
5 |
0 | 40 | — | ||||||
| 1 | 41 | — | |||||||
| 2 | 42 | — | |||||||
| 3 | 43 | — | |||||||
| 4 | 44 | — | |||||||
| 5 | 45 | — | |||||||
| 6 | 46 | — | |||||||
| 7 | 47 | تعطيل التصحيح الذي يتم التحكم فيه بواسطة العملية | عالي | ||||||
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل | صورة العملية | ||||
|
نسبي |
مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
3 |
6 |
0 | 48 | — |
ü |
ü |
|||
| 1 | 49 | — | |||||||
| 2 | 50 | — | |||||||
| 3 | 51 | — | |||||||
| 4 | 52 | — | |||||||
| 5 | 53 | — | |||||||
| 6 | 54 | — | |||||||
| 7 | 55 | — | |||||||
|
7 |
0 | 56 | ExtInput1 => OPT_Output 1 | عالي | |||||
| 1 | 57 | ExtInput2 => OPT_Output 2 | عالي | ||||||
| 2 | 58 | ExtInput3 => OPT_Output 3 | عالي | ||||||
| 3 | 59 | ExtInput4 => OPT_Output 4 | عالي | ||||||
| 4 | 60 | ExtInput5 => OPT_Output 5 | عالي | ||||||
| 5 | 61 | ExtInput6 => OPT_Output 6 | عالي | ||||||
| 6 | 62 | ExtInput7 => OPT_Output 7 | عالي | ||||||
| 7 | 63 | ExtInput8 => OPT_Output 8 | عالي | ||||||
| 4 | 8-
9 |
0–7 | 64–79 | خصائص اللحام- / رقم المهمة | UINT16 | 0 إلى 1000 | 1 | ü | ü |
|
5 |
10 - 11 |
0-7 |
80-95 |
عملية اللحام MIG/MAG: 1)
السلك الثابت:
قيمة أمر سرعة تغذية السلك |
سينت16 |
-327,68 إلى 327,67 [م / دقيقة] |
100 |
ü |
ü |
| عملية اللحام WIG: 2)
قيمة الأمر الحالي Main-/Hotwire |
UINT16 |
0 الى 6553,5 [أ] |
10 |
||||||
| لوضع العمل:
تصحيح الطاقة |
سينت16 |
-20,00 إلى
20,00 [٪] |
100
|
||||||
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل | صورة العملية | ||||
|
نسبي |
مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
6 |
12 - 13 |
0-7 |
96-111 |
عملية اللحام MIG/MAG: 1)
تصحيح طول القوس |
سينت16 |
-10,0 إلى
10,0 [خطوه] |
10 |
ü |
ü |
| عملية اللحام
MIG/MAG قياسي-يدوي:
اللحام المجلدtage |
UINT16 |
0,0 الى
6553,5 [الخامس] |
10 |
||||||
| عملية اللحام WIG: 2)
قيمة أمر سرعة تغذية السلك |
سينت16 |
-327,68 إلى 327,67 [م / دقيقة] |
100 |
||||||
| لوضع العمل:
تصحيح طول القوس |
سينت16 |
-10,0 إلى
10,0 [خطوه] |
10 |
||||||
| عملية اللحام بالسلك الثابت:
التيار الكهربائي |
UINT16 |
0,0 الى
6553,5 [أ] |
10 |
||||||
|
7 |
14 - 15 |
0-7 |
112-127 |
عملية اللحام MIG/MAG: 1)
التصحيح النبضي/الديناميكي |
سينت16 |
-10,0 إلى
10,0 [خطوات] |
10 |
ü |
ü |
| عملية اللحام
MIG/MAG قياسي-يدوي:
متحرك |
UINT16 |
0,0 الى
10,0 [خطوات] |
10 |
||||||
| عملية اللحام WIG: 2)
تصحيح الأسلاك |
سينت16 |
-10,0 إلى
10,0 [خطوات] |
10 |
||||||
|
8 |
16 - 17 |
0-7 |
128-143 |
عملية اللحام MIG/MAG: 1)
تصحيح سحب السلك |
UINT16 |
0,0 الى
10,0 [خطوات] |
10 |
ü |
|
| عملية اللحام WIG: 2)
نهاية سحب السلك |
UINT16 |
إيقاف، 1 إلى
50 [مم] |
1 |
||||||
|
9 |
18
- 19 |
0-7 |
144-159 |
سرعة اللحام |
UINT16 |
0,0 الى
1000,0 [سم/دقيقة] |
10 |
ü |
|
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل | صورة العملية | ||||
|
نسبي |
مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
10 |
20 - 21 |
0-7 |
160-175 |
تصحيح التحكم في العملية |
انظر الجدول قيمة النطاق ل عملية مُسيطر عليه تصحيح على الصفحة 36 |
ü |
|||
|
11 |
22
- 23 |
0-7 |
176-191 |
عملية اللحام WIG: 2)
بداية وضع الأسلاك |
ü |
||||
|
12 |
24
- 25 |
0-7 |
192-207 |
— |
ü |
||||
|
13 |
26
- 27 |
0-7 |
208-223 |
— |
ü |
||||
|
14 |
28
- 29 |
0-7 |
224-239 |
— |
ü |
||||
|
15 |
30
- 31 |
0-7 |
240-255 |
طول السلك للأمام / للخلف |
UINT16 |
إيقاف / 1 إلى 65535 [مم] |
1 |
ü |
|
|
16 |
32
- 33 |
0-7 |
256-271 |
كشف حافة السلك |
UINT16 |
إيقاف / 0,5
إلى 20,0 [مم] |
10 |
ü |
|
|
17 |
34
- 35 |
0-7 |
272-287 |
— |
ü |
||||
|
18 |
36
- 37 |
0-7 |
288-303 |
— |
ü |
||||
|
19 |
38
- 39 |
0-7 |
304-319 |
رقم التماس |
UINT16 |
0 الى
65535 |
1 |
ü |
|
- MIG/MAG نبض تآزري، MIG/MAG قياسي تآزري، MIG/MAG قياسي-مانويل، MIG/MAG PMC، MIG/MAG، LSC
- سلك بارد للشعر المستعار، سلك ساخن للشعر المستعار
نطاق القيمة لوضع العمل
| بت 4 | بت 3 | بت 2 | بت 1 | بت 0 | وصف |
| 0 | 0 | 0 | 0 | 0 | اختيار المعلمة الداخلية |
| 0 | 0 | 0 | 0 | 1 | خصائص وضع الخطوتين الخاصة |
| 0 | 0 | 0 | 1 | 0 | وضع العمل |
| بت 4 | بت 3 | بت 2 | بت 1 | بت 0 | وصف |
| 0 | 1 | 0 | 0 | 0 | خصائص وضع الخطوتين |
| 0 | 1 | 0 | 0 | 1 | دليل قياسي من خطوتين لـ MIG/MAG |
| 1 | 0 | 0 | 0 | 0 | وضع الخمول |
| 1 | 0 | 0 | 0 | 1 | إيقاف مضخة سائل التبريد |
| 1 | 1 | 0 | 0 | 1 | قياس R/L |
نطاق القيمة لوضع التشغيل
نطاق القيمة لوضع التوثيق
| بت 0 | وصف |
| 0 | رقم اللحام لآلة اللحام (داخلي) |
| 1 | عدد طبقات الروبوتات (كلمة 19) |
نطاق القيمة لوضع التوثيق
نطاق القيمة للتصحيح الذي يقوده التحكم في العملية
|
عملية |
إشارة |
نوع النشاط/البيانات |
تكوين نطاق القيمة يتراوح |
وحدة |
عامل |
|
شركة إدارة المشروعات |
مثبت طول القوس |
سينت16 |
-327.8 إلى +327.7
0.0 إلى +5.0 |
فولت |
10 |
نطاق القيمة لوضع التوثيق
نطاق القيمة للتصحيح الذي يقوده التحكم في العملية
|
عملية |
إشارة |
نوع النشاط/البيانات |
تكوين نطاق القيمة يتراوح |
وحدة |
عامل |
|
شركة إدارة المشروعات |
مثبت طول القوس |
سينت16 |
-327.8 إلى +327.7
0.0 إلى +5.0 |
فولت |
10 |
نطاق القيمة للتصحيح المعتمد على العملية
نطاق القيمة اختيار خط العملية
| بت 1 | بت 0 | وصف |
| 0 | 0 | خط العملية 1 (افتراضي) |
| 0 | 1 | خط المعالجة 2 |
| 1 | 0 | خط المعالجة 3 |
| 1 | 1 | محجوز |
نطاق القيمة لاختيار خط العملية
نطاق القيمة لوضع TWIN
| بت 1 | بت 0 | وصف |
| 0 | 0 | الوضع الفردي المزدوج |
| 0 | 1 | وضع الرصاص المزدوج |
| 1 | 0 | وضع المسار المزدوج |
| 1 | 1 | محجوز |
نطاق القيمة لوضع TWIN
توفر إشارات الإخراج
تتوفر إشارات الإخراج المدرجة أدناه من البرنامج الثابت V2.0.0 من RI FB PRO/i فصاعدًا.
إشارات الإخراج (من مصدر الطاقة إلى الروبوت)
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل |
صورة العملية | ||||
| نسبي | مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
0 |
0 |
0 | 0 | مصدر طاقة نبضات القلب | عالي/منخفض | 1 هرتز |
ü |
ü |
|
| 1 | 1 | مصدر الطاقة جاهز | عالي | ||||||
| 2 | 2 | تحذير | عالي | ||||||
| 3 | 3 | عملية نشطة | عالي | ||||||
| 4 | 4 | تدفق التيار | عالي | ||||||
| 5 | 5 | قوس مستقر / إشارة لمس | عالي | ||||||
| 6 | 6 | إشارة التيار الرئيسية | عالي | ||||||
| 7 | 7 | إشارة اللمس | عالي | ||||||
|
1 |
0 |
8 |
صندوق الاصطدام نشط |
عالي |
0 = تصادم أو انقطاع الكابل | ||||
| 1 | 9 | إطلاق حركة الروبوت | عالي | ||||||
| 2 | 10 | قطعة سلك عصا الشغل | عالي | ||||||
| 3 | 11 | — | |||||||
| 4 | 12 | طرف اتصال الدائرة القصيرة | عالي | ||||||
| 5 | 13 | اختيار المعلمة إلى الأبد | عالي | ||||||
| 6 | 14 | رقم مميز صالح | عالي | ||||||
| 7 | 15 | جسم الشعلة ممسوك | عالي | ||||||
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل |
صورة العملية | ||||
| نسبي | مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
1 |
2 |
0 | 16 | قيمة الأمر خارج النطاق | عالي |
ü |
ü |
||
| 1 | 17 | تصحيح خارج النطاق | عالي | ||||||
| 2 | 18 | — | |||||||
| 3 | 19 | إشارة الحد | عالي | ||||||
| 4 | 20 | — | |||||||
| 5 | 21 | — | |||||||
| 6 | 22 | حالة العرض الرئيسية | قليل | ||||||
| 7 | 23 | — | |||||||
|
3 |
0 | 24 | حالة المستشعر 1 | عالي |
انظر الجدول تعيين- مهارة سينسوr ستا- يستخدم 1-4 على الصفحة 40 |
||||
| 1 | 25 | حالة المستشعر 2 | عالي | ||||||
| 2 | 26 | حالة المستشعر 3 | عالي | ||||||
| 3 | 27 | حالة المستشعر 4 | عالي | ||||||
| 4 | 28 | — | |||||||
| 5 | 29 | — | |||||||
| 6 | 30 | — | |||||||
| 7 | 31 | — | |||||||
|
2 |
4 |
0 | 32 | — |
ü |
ü |
|||
| 1 | 33 | — | |||||||
| 2 | 34 | — | |||||||
| 3 | 35 | حالة الأمان بت 0 | عالي | انظر الجدول القيمة ران حالة السلامة على الصفحة 41 | |||||
| 4 | 36 | حالة الأمان بت 1 | عالي | ||||||
| 5 | 37 | — | |||||||
| 6 | 38 | إشعار | عالي | ||||||
| 7 | 39 | النظام غير جاهز | عالي | ||||||
|
5 |
0 | 40 | — | ||||||
| 1 | 41 | — | |||||||
| 2 | 42 | — | |||||||
| 3 | 43 | — | |||||||
| 4 | 44 | — | |||||||
| 5 | 45 | — | |||||||
| 6 | 46 | — | |||||||
| 7 | 47 | — | |||||||
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل |
صورة العملية | ||||
| نسبي | مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
3 |
6 |
0 | 48 | بت العملية 0 | عالي |
انظر الجدول قيمة يتراوح ل عملية قليل على الصفحة 41 |
ü |
ü |
|
| 1 | 49 | بت العملية 1 | عالي | ||||||
| 2 | 50 | بت العملية 2 | عالي | ||||||
| 3 | 51 | بت العملية 3 | عالي | ||||||
| 4 | 52 | بت العملية 4 | عالي | ||||||
| 5 | 53 | — | |||||||
| 6 | 54 | فوهة الغاز ذات الإشارة اللمسية | عالي | ||||||
| 7 | 55 | مزامنة TWIN نشطة | عالي | ||||||
|
7 |
0 | 56 | ExtOutput1 <= OPT_In-put1 | عالي | |||||
| 1 | 57 | ExtOutput2 <= OPT_In-put2 | عالي | ||||||
| 2 | 58 | ExtOutput3 <= OPT_In-put3 | عالي | ||||||
| 3 | 59 | ExtOutput4 <= OPT_In-put4 | عالي | ||||||
| 4 | 60 | ExtOutput5 <= OPT_In-put5 | عالي | ||||||
| 5 | 61 | ExtOutput6 <= OPT_In-put6 | عالي | ||||||
| 6 | 62 | ExtOutput7 <= OPT_In-put7 | عالي | ||||||
| 7 | 63 | ExtOutput8 <= OPT_In-put8 | عالي | ||||||
| 4 | 8-
9 |
0-7 | 64-79 | اللحام المجلدtage | UINT16 | 0.0 الى
655.35 [الخامس] |
100 | ü | ü |
|
5 |
10
- 11 |
0-7 |
80-95 |
تيار اللحام |
UINT16 |
0.0 إلى 6553.5 [أ] |
10 |
ü |
ü |
|
6 |
12
- 13 |
0-7 |
96-111 |
سرعة تغذية السلك |
سينت16 |
-327.68 إلى
327.67 [م/دقيقة] |
100 |
ü |
ü |
|
7 |
14
- 15 |
0-7 |
112-127 |
القيمة الحقيقية الفعلية لتتبع اللحامات |
UINT16 |
0 الى
6.5535 |
10000 |
ü |
ü |
|
8 |
16
- 17 |
0-7 |
128-143 |
رقم خاطئ |
UINT16 |
0 الى
65535 |
1 |
ü |
|
|
9 |
18
- 19 |
0-7 |
144-159 |
رقم التحذير |
UINT16 |
0 الى
65535 |
1 |
ü |
|
|
عنوان |
إشارة |
نوع النشاط/البيانات |
يتراوح |
عامل |
صورة العملية | ||||
| نسبي | مطلق | معيار | اقتصاد | ||||||
| كلمة | BYTE | قليل |
قليل |
||||||
|
10 |
20
- 21 |
0-7 |
160-175 |
تيار المحرك M1 |
سينت16 |
-327.68 إلى
327.67 [أ] |
100 |
ü |
|
|
11 |
22
- 23 |
0-7 |
176-191 |
تيار المحرك M2 |
سينت16 |
-327.68 إلى
327.67 [أ] |
100 |
ü |
|
|
12 |
24
- 25 |
0-7 |
192-207 |
تيار المحرك M3 |
سينت16 |
-327.68 إلى
327.67 [أ] |
100 |
ü |
|
|
13 |
26
- 27 |
0-7 |
208-223 |
— |
ü |
||||
|
14 |
28
- 29 |
0-7 |
224-239 |
— |
ü |
||||
|
15 |
30
- 31 |
0-7 |
240-255 |
— |
ü |
||||
|
16 |
32
- 33 |
0-7 |
256-271 |
موضع السلك |
سينت16 |
-327.68 إلى
327.67 [مم] |
100 |
ü |
|
|
17 |
34
- 35 |
0-7 |
272-287 |
— |
ü |
||||
|
18 |
36
- 37 |
0-7 |
288-303 |
— |
ü |
||||
|
19 |
38
- 39 |
0-7 |
304-319 |
— |
ü |
||||
تعيين حالات المستشعر 1-4
| إشارة | وصف |
| حالة المستشعر 1 | نهاية السلك OPT/i WF R (4,100,869) |
| حالة المستشعر 2 | أسطوانة سلك OPT/i WF R (4,100,879) |
| حالة المستشعر 3 | مستشعر حلقة OPT/i WF R (4,100,878) |
| حالة المستشعر 4 | مجموعة عازلة الأسلاك CMT TPS/I (4,001,763) |
تعيين حالات المستشعر
نطاق القيمة حالة السلامة
| بت 1 | بت 0 | وصف |
| 0 | 0 | احتياطي |
| 0 | 1 | يمسك |
| 1 | 0 | قف |
| 1 | 1 | غير مثبت / غير نشط |
نطاق القيمة لبت العملية
| بت 4 | بت 3 | بت 2 | بت 1 | بت 0 | وصف |
| 0 | 0 | 0 | 0 | 0 | لا يوجد اختيار أو عملية داخلية للمعلمة |
| 0 | 0 | 0 | 0 | 1 | نبضات MIG/MAG التآزرية |
| 0 | 0 | 0 | 1 | 0 | التآزر القياسي MIG / MAG |
| 0 | 0 | 0 | 1 | 1 | MIG/MAG PMC |
| 0 | 0 | 1 | 0 | 0 | MIG/MAG LSC |
| 0 | 0 | 1 | 0 | 1 | دليل MIG/MAG القياسي |
| 0 | 0 | 1 | 1 | 0 | القطب الكهربائي |
| 0 | 0 | 1 | 1 | 1 | تيج |
| 0 | 1 | 0 | 0 | 0 | سي ام تي |
| 0 | 1 | 0 | 0 | 1 | قسطنطين |
| 0 | 1 | 0 | 1 | 0 | كولد واير |
| 0 | 1 | 0 | 1 | 1 | ديناميكيات الأسلاك |
نطاق القيمة لبت العملية
نطاق القيمة لحالة الوظيفة
| بت 1 | بت 0 | وصف |
| 0 | 0 | غير نشط |
| 0 | 1 | عاطل |
| 1 | 0 | انتهى |
| 1 | 1 | خطأ |
نطاق القيمة لحالة الوظيفة

- Spareparts.fronius.com
- At www.fronius.com/contact ستجد تفاصيل الاتصال الخاصة بجميع الشركات التابعة لشركة Fronius وشركاء المبيعات والخدمات. الأسئلة الشائعة
كيف يمكنني استكشاف أخطاء مؤشرات حالة LED وإصلاحها؟
إذا كان مصباح LED MS مضاءً باللون الأحمر، فهذا يشير إلى خطأ رئيسي. وإذا كان يومض باللون الأحمر، فهذا يشير إلى خطأ يمكن إصلاحه. بالنسبة لمصباح LED NS، قد يشير الضوء الأحمر إلى عنوان IP مزدوج أو خطأ خطير في الشبكة.
ما هي معلمات التكوين الافتراضية لوحدة الحافلة؟
تتضمن معلمات التكوين الافتراضية معرف البائع: 0534hex، نوع الجهاز: محول اتصالات، رمز المنتج: 0320hex، اسم المنتج: Fronius FB Pro Ethernet/IP-2-Port.
المستندات / الموارد
 |
وحدة الاتصال المدمجة Fronius RI MOD [بي دي اف] دليل التعليمات وحدة الاتصال المدمجة RI MOD، RI MOD، وحدة الاتصال المدمجة، وحدة الاتصال، وحدة |



