وحدة الإدخال أو الإخراج EMKO PROOP

مقدمة
تُستخدم وحدة Proop-I / O Module مع جهاز Prop. يمكن استخدامه أيضًا كمسار بيانات لأي علامة تجارية. سيكون هذا المستند مفيدًا للمستخدم لتثبيت وحدة Proop-I / O Module وتوصيلها.
- قبل البدء في تثبيت هذا المنتج ، يرجى قراءة دليل التعليمات.
- ربما تم تحديث محتويات الوثيقة. يمكنك الوصول إلى أحدث إصدار في www.emkoelektronik.com.tr
- يستخدم هذا الرمز لتحذيرات السلامة. يجب على المستخدم الانتباه إلى هذه التحذيرات.
الظروف البيئية
| درجة حرارة التشغيل : | 0-50 درجة مئوية |
| الرطوبة القصوى: | 0-90٪ RH (بدون تكثيف) |
| وزن : | 238 جرام |
| البعد : | 160 × 90 × 35 ملم |
سمات
تنقسم وحدات Proop-I / O النمطية إلى عدة أنواع وفقًا للمدخلات والمخرجات. الأنواع على النحو التالي.
| نوع المنتج
Proop-I / OP |
A |
. |
B |
. |
C |
. |
D |
. |
E |
. |
F |
| 2 | 2 | 1 | 3 | ||||||||
| توريد الوحدة | |||||||||||
| 24 Vdc / Vac (عزل) | 2 | |||
| تواصل | ||||
| RS-485 (عزل) | 2 | |||
| المدخلات الرقمية | ||||
| شنومكس الرقمية | 1 | |||
| المخرجات الرقمية | ||||
| 8x 1A الترانزستور (+ V) | 3 | |||
| مدخلات تناظرية | ||||
| 5x Pt-100 (-200 ... 650 درجة مئوية)
5x 0/4..20mAdc 5x 0…10Vdc 5x 0… 50mV |
1 | ||
| 2 | |||
| 3 | |||
| 4 | |||
| المخرجات التناظرية | |||
| 2x 0/4 ... 20mAdc
2x 0… 10 فولت تيار مستمر |
1 | ||
| 2 | |||
أبعاد
تركيب الوحدة على جهاز Proop
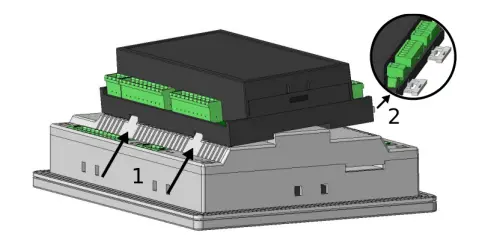 |
1- أدخل وحدة إدخال / إخراج Prop في فتحات جهاز Prop كما في الصورة.
2- تحقق من توصيل أجزاء القفل بجهاز Proop-I / O Module وسحبها للخارج. |
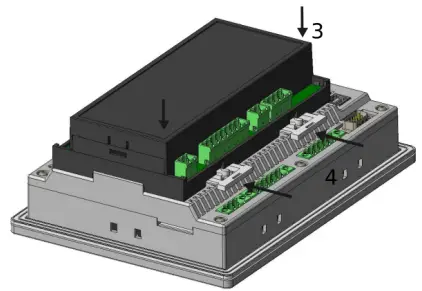 |
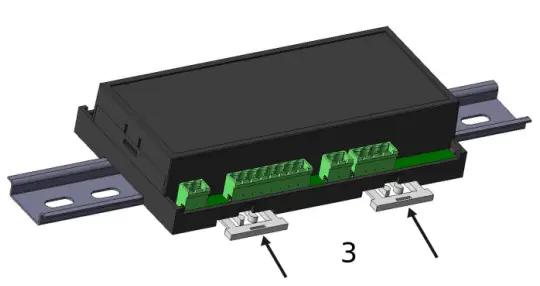
3- اضغط على جهاز Proop-I / O Module بقوة في الاتجاه المحدد.
4- أدخل أجزاء القفل عن طريق دفعها للداخل. |
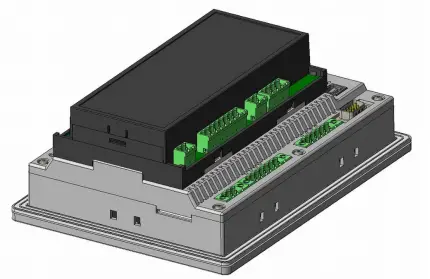 |
5- يجب أن تبدو الصورة المدرجة لجهاز الوحدة النمطية مثل تلك الموجودة على اليسار. |
تركيب الوحدة على DIN-Ray
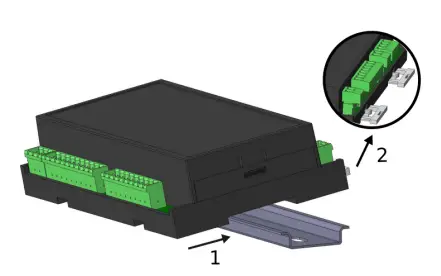 |
1- اسحب جهاز Proop-I / O Module على أشعة DIN كما هو موضح.
2- تحقق من توصيل أجزاء القفل بجهاز Prop- I / O Module وسحبها للخارج. |
 |
3- أدخل أجزاء القفل عن طريق دفعها للداخل. |
 |
4- يجب أن تبدو الصورة المدرجة لجهاز الوحدة النمطية مثل تلك الموجودة على اليسار. |
تثبيت
- قبل البدء في تثبيت هذا المنتج ، يرجى قراءة دليل التعليمات والتحذيرات أدناه بعناية.
- يوصى بإجراء فحص بصري لهذا المنتج بحثًا عن التلف المحتمل الذي حدث أثناء الشحن قبل التثبيت. تقع على عاتقك مسؤولية التأكد من قيام الفنيين الميكانيكيين والكهربائيين المؤهلين بتثبيت هذا المنتج.
- لا تستخدم الوحدة في أجواء غازية قابلة للاشتعال أو الانفجار.
- لا تعرض الوحدة لأشعة الشمس المباشرة أو أي مصدر حرارة آخر.
- لا تضع الوحدة بالقرب من المعدات المغناطيسية مثل المحولات أو المحركات أو الأجهزة التي تولد تداخلاً (آلات اللحام ، إلخ)
- لتقليل تأثير الضوضاء الكهربائية على الجهاز ، حجم منخفضtagيجب فصل أسلاك الخط الإلكتروني (خاصة كابل إدخال المستشعر) عن التيار العالي والحجمtagخط البريد.
- أثناء تركيب الجهاز في اللوحة ، يمكن أن تتسبب الحواف الحادة على الأجزاء المعدنية في حدوث جروح في اليدين ، يرجى توخي الحذر.
- يجب أن يتم تركيب المنتج باستخدام clamps.
- لا تقم بتركيب الجهاز باستخدام clampس. لا تسقط الجهاز أثناء التثبيت.
- إذا أمكن ، استخدم كبلًا محميًا. لمنع الحلقات الأرضية ، يجب تأريض الدرع من طرف واحد فقط.
- لمنع حدوث صدمة كهربائية أو تلف الجهاز ، لا تقم بتوصيل الطاقة بالجهاز حتى يتم الانتهاء من جميع الأسلاك.
- تم تصميم المخرجات الرقمية ووصلات الإمداد بحيث تكون معزولة عن بعضها البعض.
- قبل تشغيل الجهاز ، يجب ضبط المعلمات وفقًا للاستخدام المطلوب.
- قد يكون التكوين غير الكامل أو غير الصحيح خطيرًا.
- عادةً ما يتم توفير الوحدة بدون مفتاح طاقة أو مصهر أو قاطع دائرة. استخدم مفتاح الطاقة ، والمصهر ، وقاطع الدائرة وفقًا لما تتطلبه اللوائح المحلية.
- تطبيق فقط المجلد المصنف من امدادات الطاقةtagه للوحدة ، لمنع تلف المعدات.
- إذا كان هناك خطر وقوع حادث خطير ناتج عن عطل أو عيب في هذه الوحدة ، فقم بإيقاف تشغيل النظام وفصل الجهاز عن النظام.
- لا تحاول أبدًا فك أو تعديل أو إصلاح هذه الوحدة. تيampقد يؤدي استخدام الوحدة إلى حدوث عطل أو حدوث صدمة كهربائية أو نشوب حريق.
- يرجى الاتصال بنا إذا كانت لديك أي أسئلة تتعلق بالتشغيل الآمن لهذه الوحدة.
- يجب استخدام هذا الجهاز بالطريقة المحددة في دليل التعليمات هذا.
الاتصالات
مزود الطاقة
 |
صالة |
| + | |
|
- |
رابط الاتصال بجهاز HMI
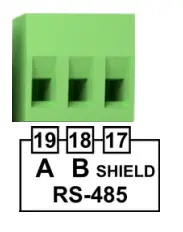 |
صالة |
| A | |
| B | |
| أرضي |
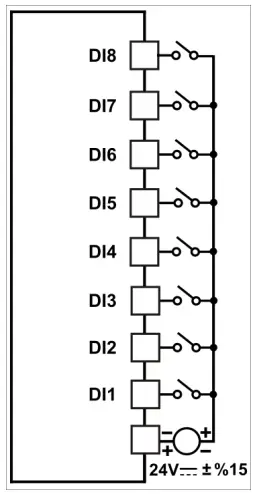
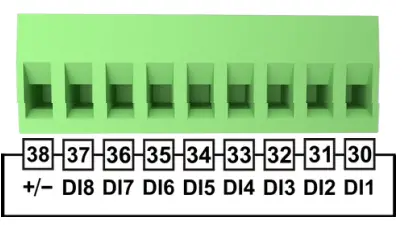
المدخلات الرقمية
|
|
صالة | تعليق | مخطط الاتصال |
| دي8 |
المدخلات الرقمية |
 |
|
| دي7 | |||
| دي6 | |||
| دي5 | |||
| دي4 | |||
| دي3 | |||
| دي2 | |||
| دي1 | |||
|
+/- |
نبن / بنب
اختيار المدخلات الرقمية |
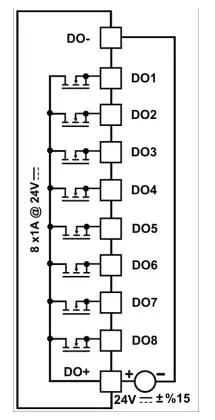
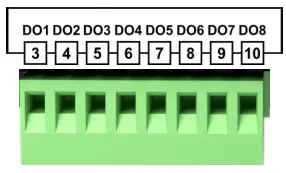
المخرجات الرقمية
|
|
صالة | تعليق | مخطط الاتصال |
| DO1 |
المخرجات الرقمية |
 |
|
| DO2 | |||
| DO3 | |||
| DO4 | |||
| DO5 | |||
| DO6 | |||
| DO7 | |||
| DO8 |
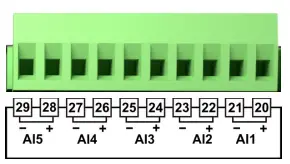
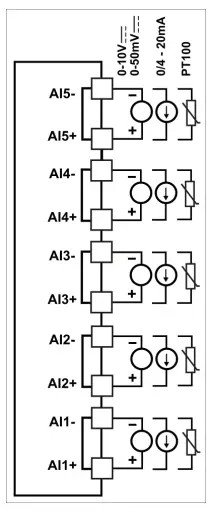
مدخلات تناظرية
|
صالة | تعليق | مخطط الاتصال |
| AI5- |
المدخلات التناظرية 5 |
 |
|
| AI5 + | |||
| AI4- |
المدخلات التناظرية 4 |
||
| AI4 + | |||
| AI3- |
المدخلات التناظرية 3 |
||
| AI3 + | |||
| AI2- |
المدخلات التناظرية 2 |
||
| AI2 + | |||
| AI1- |
المدخلات التناظرية 1 |
||
| AI1 + |
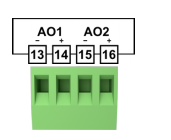
المخرجات التناظرية
|
|
صالة | تعليق | مخطط الاتصال |
|
AO + |
توريد المخرجات التناظرية |
 |
|
|
آو- |
|||
|
ايه او 1 |
المخرجات التناظرية |
||
|
ايه او 2 |
المميزات التقنية
مزود الطاقة
| مزود الطاقة | : | 24 فولت تيار مستمر |
| النطاق المسموح به | : | 20.4 – 27.6 فولت تيار مستمر |
| استهلاك الطاقة | : | 3W |
المدخلات الرقمية
| المدخلات الرقمية | : | 8 المدخلات | |
| حجم الإدخال الاسميtage | : | 24 فولت تيار مستمر | |
|
حجم الإدخالtage |
: |
للمنطق 0 | للمنطق 1 |
| <5 فولت تيار مستمر | > 10 فولت تيار مستمر | ||
| تيار الإدخال | : | 6 مللي أمبير كحد أقصى. | |
| معاوقة الإدخال | : | 5.9 كيلو أوم | |
| وقت الاستجابة | : | من "0" إلى "1" 50 مللي ثانية | |
| العزلة كلفاني | : | 500 فولت تيار متردد لمدة دقيقة واحدة | |
مدخلات عداد السرعة العالية
| مدخلات HSC | : | 2 المدخلات (HSC1: DI1 و DI2 ، HSC2: DI3 و DI4) | |
| حجم الإدخال الاسميtage | : | 24 فولت تيار مستمر | |
|
حجم الإدخالtage |
: |
للمنطق 0 | للمنطق 1 |
| <10 فولت تيار مستمر | > 20 فولت تيار مستمر | ||
| تيار الإدخال | : | 6 مللي أمبير كحد أقصى. | |
| معاوقة الإدخال | : | 5.6 كيلو أوم | |
| نطاق التردد | : | 15 كيلو هرتز كحد أقصى. لمرحلة واحدة 10 كيلو هرتز كحد أقصى. لمرحلة مزدوجة | |
| العزلة كلفاني | : | 500 فولت تيار متردد لمدة دقيقة واحدة | |
المخرجات الرقمية
| المخرجات الرقمية | 8 الناتج | |
| المخرجات الحالية | : | 1 أ كحد أقصى. (إجمالي التيار 8 أ كحد أقصى) |
| العزلة كلفاني | : | 500 فولت تيار متردد لمدة دقيقة واحدة |
| حماية من الدوائر القصيرة | : | نعم |
مدخلات تناظرية
| مدخلات تناظرية | : | 5 المدخلات | |||
|
معاوقة الإدخال |
: |
PT-100 | 0/4-20 مللي أمبير | 0-10 فولت | 0-50mV |
| -200oسي-650oC | 100 أوم | > 6.6 كيلو أوم | > 10MΩ | ||
| العزلة كلفاني | : | لا | |||
| دقة | : | 14 بت | |||
| دقة | : | ±0,25% | |||
| Sampتوقيت لينغ | : | 250 مللي ثانية | |||
| إشارة الحالة | : | نعم | |||
المخرجات التناظرية
|
المخرج التناظري |
: |
2 الناتج | |
| 0/4-20 مللي أمبير | 0-10 فولت | ||
| العزلة كلفاني | : | لا | |
| دقة | : | 12 بت | |
| دقة | : | 1% من الحجم الكامل | |
تعريفات العنوان الداخلية
إعدادات الاتصال:
| حدود | عنوان | خيارات | تقصير |
| ID | 40001 | 1–255 | 1 |
| بريدات | 40002 | 0-1200 / 1- 2400 / 2- 4000 / 3-9600 / 4-19200 / 5- 38400 /
6- 57600 / 7- 115200 |
6 |
| توقف بت | 40003 | 0-1 بت / 1-2 بت | 0 |
| التكافؤ | 40004 | 0- لا شيء / 1- زوجي / 2- فردي | 0 |
عناوين الجهاز:
| ذاكرة | شكل | ارانج | عنوان | يكتب |
| المدخلات الرقمية | دين | ن: 0-7 | 10001 – 10008 | يقرأ |
| الإخراج الرقمي | اِتَّشَح | ن: 0-7 | 1 – 8 | قراءة وكتابة |
| المدخلات التناظرية | عين | ن: 0-7 | 30004 – 30008 | يقرأ |
| المخرج التناظري | أون | ن: 0-1 | 40010 – 40011 | قراءة وكتابة |
| الإصدار* | (ااااببببكككككك)قليل | ن: 0 | 30001 | يقرأ |
- ملحوظة:البتات في هذا العنوان كبيرة ، والبتات هي رقم إصدار ثانوي ، والبتات تشير إلى نوع الجهاز.
- Exampعلى: قراءة القيمة من 30001 (0x2121) عرافة = (0010000100100001) بت ،
- a بت (001) بت = 1 (رقم الإصدار الرئيسي)
- b بت (00001) بت = 1 (رقم إصدار ثانوي)
- c بت (00100001) بت = 33 (يشار إلى أنواع الأجهزة في الجدول.) إصدار الجهاز = V1.1
- نوع الجهاز = 0-10 فولت إدخال تناظري 0-10 فولت إخراج تناظري
أنواع الجهاز:
| نوع الجهاز | قيمة |
| PT100 المدخلات التناظرية 4-20mA الإخراج التناظري | 0 |
| PT100 المدخلات التناظرية 0-10 فولت الإخراج التناظري | 1 |
| 4-20 مللي أمبير إدخال تناظري 4-20 مللي أمبير إخراج تناظري | 16 |
| 4-20mA إدخال تناظري 0-10 فولت خرج تناظري | 17 |
| 0-10 فولت إدخال تناظري 4-20 مللي أمبير إخراج تناظري | 32 |
| 0-10V المدخلات التناظرية 0-10V الإخراج التناظري | 33 |
| 0-50mV الإدخال التناظري 4-20mA الإخراج التناظري | 48 |
| 0-50mV الإدخال التناظري 0-10V الإخراج التناظري | 49 |
يتم وصف تحويل القيم المقروءة من الوحدة وفقًا لنوع الإدخال التناظري في الجدول التالي:
| المدخلات التناظرية | نطاق القيمة | تحويل عامل | Example من القيمة الموضحة في PROOP |
|
PT-100 -200° - 650° |
-2000 – 6500 |
x10-1 |
Example-1: يتم تحويل قيمة القراءة كـ 100 إلى 10oC. |
| Example-2: يتم تحويل قيمة القراءة كـ 203 إلى 20.3oC. | |||
| 0 - 10 فولت | 0 – 20000 | 0.5×10-3 | Example-1: يتم تحويل قيمة القراءة كـ 2500 إلى 1.25 فولت. |
| 0 - 50mV | 0 – 20000 | 2.5×10-3 | Example-1: يتم تحويل قيمة القراءة كـ 3000 إلى 7.25mV. |
|
0/4 - 20 مللي أمبير |
0 – 20000 |
0.1×10-3 |
Example-1: يتم تحويل قيمة القراءة 3500 إلى 7mA. |
| Example-2: يتم تحويل قيمة القراءة 1000 إلى 1mA. |
يتم وصف تحويل القيم المكتوبة في الوحدة وفقًا لنوع الإخراج التناظري في الجدول التالي:
| المخرج التناظري | نطاق القيمة | تحويل معدل | Exampلو القيمة المكتوبة في الوحدات |
| 0 - 10 فولت | 0 – 10000 | x103 | Example-1: القيمة المراد كتابتها كـ 1.25 فولت يتم تحويلها إلى 1250. |
| 0/4 - 20 مللي أمبير | 0 – 20000 | x103 | Example-1: القيمة المراد كتابتها كـ 1.25mA يتم تحويلها إلى 1250. |
عناوين خاصة بالمدخلات التناظرية:
| المعلمة | AI1 | AI2 | AI3 | AI4 | AI5 | تقصير |
| إعدادات أجزاء | 40123 | 40133 | 40143 | 40153 | 40163 | 0 |
| الحد الأدنى لقيمة المقياس | 40124 | 40134 | 40144 | 40154 | 40164 | 0 |
| الحد الأقصى لقيمة المقياس | 40125 | 40135 | 40145 | 40155 | 40165 | 0 |
| قيمة متدرجة | 30064 | 30070 | 30076 | 30082 | 30088 | - |
بت تكوين المدخلات التناظرية:
| AI1 | AI2 | AI3 | AI4 | AI5 | وصف |
| 40123.0قليل | 40133.0قليل | 40143.0قليل | 40153.0قليل | 40163.0قليل | 4-20mA / 2-10V حدد:
0 = 0-20 مللي أمبير / 0-10 فولت 1 = 4-20 مللي أمبير / 2-10 فولت |
يتم حساب القيمة المحسوبة للمدخلات التناظرية وفقًا لحالة بت تكوين التحديد 4-20mA / 2-10V.
عناوين محددة للمخرجات التناظرية:
| المعلمة | ايه او 1 | ايه او 2 | تقصير |
| الحد الأدنى لقيمة مقياس الإدخال | 40173 | 40183 | 0 |
| الحد الأقصى لقيمة المقياس للإدخال | 40174 | 40184 | 20000 |
| الحد الأدنى لقيمة مقياس الإخراج | 40175 | 40185 | 0 |
| الحد الأقصى لقيمة مقياس الإخراج | 40176 | 40186 | 10000/20000 |
| وظيفة الإخراج التناظري
0: الاستخدام اليدوي 1: باستخدام قيم المقياس أعلاه ، فإنه يعكس المدخلات إلى المخرجات. 2: يقود الإخراج التناظري كمخرج PID ، باستخدام الحد الأدنى والحد الأقصى لمعلمات المقياس للإخراج. |
40177 | 40187 | 0 |
- في حالة ضبط معلمة وظيفة الإخراج التناظري على 1 أو 2 ؛
- يتم استخدام AI1 كمدخل لمخرج A01.
- يتم استخدام AI2 كمدخل لمخرج A02.
- لا: لا يمكن استخدام ميزة عكس المدخلات إلى المخرجات (وظيفة إخراج أنالوك = 1) في الوحدات ذات مدخلات PT100.
إعدادات HSC (عداد عالي السرعة)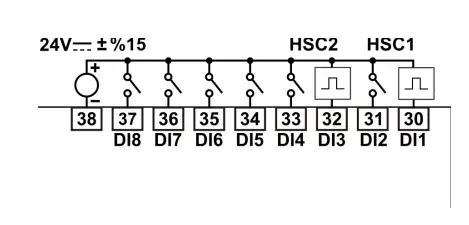
اتصال عداد أحادي الطور
- تحسب العدادات عالية السرعة الأحداث عالية السرعة التي لا يمكن التحكم فيها بمعدلات مسح PROOP-IO. الحد الأقصى لتردد العد لعداد عالي السرعة هو 10 كيلو هرتز لمدخلات جهاز التشفير و 15 كيلو هرتز لمدخلات العداد.
- هناك خمسة أنواع أساسية من العدادات: عداد أحادي الطور مع تحكم داخلي في الاتجاه ، عداد أحادي الطور مع تحكم خارجي في الاتجاه ، عداد ثنائي الطور مع مدخلين على مدار الساعة ، عداد تربيعي طور A / B ، ونوع قياس التردد.
- ملحوظة أن كل وضع لا يدعمه كل عداد. يمكنك استخدام كل نوع باستثناء نوع قياس التردد: بدون إعادة تعيين أو بدء المدخلات ، مع إعادة الضبط وبدون بدء ، أو مع كل من مدخلات البدء وإعادة التعيين.
- عندما تقوم بتنشيط إدخال إعادة التعيين ، فإنه يمسح القيمة الحالية ويبقيها واضحة حتى تقوم بإلغاء تنشيط إعادة التعيين.
- عندما تقوم بتنشيط إدخال البداية ، فإنه يسمح للعداد بالعد. أثناء إلغاء تنشيط البدء ، تظل القيمة الحالية للعداد ثابتة ويتم تجاهل أحداث تسجيل الوقت.
- إذا تم تنشيط إعادة الضبط بينما كان البدء غير نشط ، فسيتم تجاهل إعادة الضبط ولن تتغير القيمة الحالية. إذا أصبح إدخال البداية نشطًا أثناء تنشيط إدخال إعادة التعيين ، فسيتم مسح القيمة الحالية.
| حدود | عنوان | تقصير |
| تكوين HSC1 وتحديد الوضع * | 40012 | 0 |
| تكوين HSC2 وتحديد الوضع * | 40013 | 0 |
| HSC1 القيمة الحالية الجديدة (الأقل أهمية 16 بايت) | 40014 | 0 |
| HSC1 القيمة الحالية الجديدة (الأكثر أهمية 16 بايت) | 40015 | 0 |
| HSC2 القيمة الحالية الجديدة (الأقل أهمية 16 بايت) | 40016 | 0 |
| HSC2 القيمة الحالية الجديدة (الأكثر أهمية 16 بايت) | 40017 | 0 |
| HSC1 القيمة الحالية (الأقل أهمية 16 بايت) | 30010 | 0 |
| HSC1 القيمة الحالية (الأكثر أهمية 16 بايت) | 30011 | 0 |
| HSC2 القيمة الحالية (الأقل أهمية 16 بايت) | 30012 | 0 |
| HSC2 القيمة الحالية (الأكثر أهمية 16 بايت) | 30013 | 0 |
ملحوظة: هذه المعلمة ؛
- البايت الأقل دلالة هو معلمة الوضع.
- البايت الأكثر أهمية هو معلمة التكوين.
وصف تكوين HSC:
| HSC1 | HSC2 | وصف |
| 40012.8قليل | 40013.8قليل | بت التحكم في المستوى النشط لإعادة التعيين:
0 = إعادة التعيين نشطة منخفضة 1 = إعادة التعيين نشطة عالية |
| 40012.9قليل | 40013.9قليل | بت التحكم في المستوى النشط للبدء:
0 = بداية نشطة منخفضة 1 = بداية نشطة عالية |
| 40012.10قليل | 40013.10قليل | عد بت التحكم في الاتجاه:
0 = العد التنازلي 1 = العد التصاعدي |
| 40012.11قليل | 40013.11قليل | اكتب القيمة الحالية الجديدة إلى HSC:
0 = لا يوجد تحديث 1 = تحديث القيمة الحالية |
| 40012.12قليل | 40013.12قليل | تمكين HSC:
0 = تعطيل HSC 1 = تمكين HSC |
| 40012.13قليل | 40013.13قليل | احتياطي |
| 40012.14قليل | 40013.14قليل | احتياطي |
| 40012.15قليل | 40013.15قليل | احتياطي |
أوضاع HSC:
| وضع | وصف | المدخلات | |||
| HSC1 | دي1 | دي2 | دي5 | دي6 | |
| HSC2 | دي3 | دي4 | دي7 | دي8 | |
| 0 | عداد أحادي الطور مع اتجاه داخلي | ساعة | |||
| 1 | ساعة | إعادة ضبط | |||
| 2 | ساعة | إعادة ضبط | يبدأ | ||
| 3 | عداد أحادي الطور بالاتجاه الخارجي | ساعة | اتجاه | ||
| 4 | ساعة | اتجاه | إعادة ضبط | ||
| 5 | ساعة | اتجاه | إعادة ضبط | يبدأ | |
| 6 | عداد مرحلتين بإدخال ساعتين | على مدار الساعة | عقارب الساعة أسفل | ||
| 7 | على مدار الساعة | عقارب الساعة أسفل | إعادة ضبط | ||
| 8 | على مدار الساعة | عقارب الساعة أسفل | إعادة ضبط | يبدأ | |
| 9 | عداد تشفير المرحلة A / B | الساعة أ | الساعة ب | ||
| 10 | الساعة أ | الساعة ب | إعادة ضبط | ||
| 11 | الساعة أ | الساعة ب | إعادة ضبط | يبدأ | |
| 12 | احتياطي | ||||
| 13 | احتياطي | ||||
| 14 | قياس الدورة (مع 10 ميكروثانيةampوقت لينغ) | إدخال الفترة | |||
| 15 | يعداد /
فترة Ölçümü (1ms sampوقت لينغ) |
الأعلى. 15 كيلو هرتز | الأعلى. 15 كيلو هرتز | الأعلى. 1 كيلو هرتز | الأعلى. 1 كيلو هرتز |
عناوين محددة للوضع 15:
| المعلمة | دي1 | دي2 | دي3 | دي4 | دي5 | دي6 | دي7 | دي8 | تقصير |
| إعدادات أجزاء | 40193 | 40201 | 40209 | 40217 | 40225 | 40233 | 40241 | 40249 | 2 |
| فترة إعادة التعيين (1-1000 ثانية) |
40196 |
40204 |
40212 |
40220 |
40228 |
40236 |
40244 |
40252 |
60 |
| مكافحة قيمة 16 بت ذات الترتيب المنخفض | 30094 | 30102 | 30110 | 30118 | 30126 | 30134 | 30142 | 30150 | - |
| عداد القيمة العالية 16 بت | 30095 | 30103 | 30111 | 30119 | 30127 | 30135 | 30143 | 30151 | - |
| قيمة 16 بت ذات الترتيب المنخفض (مللي ثانية) | 30096 | 30104 | 30112 | 30120 | 30128 | 30136 | 30144 | 30152 | - |
| قيمة 16 بت عالية الفترة (مللي ثانية) | 30097 | 30105 | 30113 | 30121 | 30129 | 30137 | 30145 | 30153 | - |
إعدادات أجزاء:
| دي1 | دي2 | دي3 | دي4 | دي5 | دي6 | دي7 | دي8 | وصف |
| 40193.0قليل | 40201.0قليل | 40209.0قليل | 40217.0قليل | 40225.0قليل | 40233.0قليل | 40241.0قليل | 40249.0قليل | بت تمكين DIx: 0 = تمكين DIx 1 = تعطيل DIx |
|
40193.1قليل |
40201.1قليل |
40209.1قليل |
40217.1قليل |
40225.1قليل |
40233.1قليل |
40241.1قليل |
40249.1قليل |
عد بت الاتجاه:
0 = العد التنازلي 1 = العد التصاعدي |
| 40193.2قليل | 40201.2قليل | 40209.2قليل | 40217.2قليل | 40225.2قليل | 40233.2قليل | 40241.2قليل | 40249.2قليل | احتياطي |
| 40193.3قليل | 40201.3قليل | 40209.3قليل | 40217.3قليل | 40225.3قليل | 40233.3قليل | 40241.3قليل | 40249.3قليل | إعادة تعيين عدد DIx:
1 = إعادة تعيين عداد DIx |
إعدادات PID
يمكن استخدام ميزة التحكم PID أو On / Off عن طريق تعيين المعلمات المحددة لكل إدخال تناظري في الوحدة النمطية. يتحكم الإدخال التناظري المزود بوظيفة PID أو ON / OFF النشطة في الإخراج الرقمي المقابل. لا يمكن تشغيل الإخراج الرقمي المرتبط بالقناة التي تم تنشيط وظيفة PID أو ON / OFF الخاصة بها يدويًا.
- المدخلات التناظرية يتحكم AI1 في الإخراج الرقمي DO1.
- المدخلات التناظرية يتحكم AI2 في الإخراج الرقمي DO2.
- المدخلات التناظرية يتحكم AI3 في الإخراج الرقمي DO3.
- المدخلات التناظرية يتحكم AI4 في الإخراج الرقمي DO4.
- المدخلات التناظرية يتحكم AI5 في الإخراج الرقمي DO5.
معلمات PID:
| المعلمة | وصف |
| نشط PID | تمكن من تشغيل PID أو ON / OFF.
0 = الاستخدام اليدوي 1 = PID نشط 2 = تشغيل / إيقاف نشط |
| تعيين القيمة | إنها القيمة المحددة لعملية PID أو ON / OFF. يمكن أن تتراوح قيم PT100 بين -200.0 و 650.0 للإدخال و 0 و 20000 للأنواع الأخرى. |
| تعيين الإزاحة | يتم استخدامه كقيمة Set Offset في عملية PID. يمكن أن تأخذ قيمًا بين -325.0 و
325.0 لمدخلات PT100 ، من -10000 إلى 10000 للأنواع الأخرى. |
| ضبط التباطؤ | يتم استخدامه كقيمة تعيين التباطؤ في تشغيل / إيقاف التشغيل. يمكن أن تأخذ القيم بين
-325.0 و 325.0 للإدخال PT100 ، -10000 إلى 10000 للأنواع الأخرى. |
| الحد الأدنى لقيمة المقياس | مقياس العمل هو قيمة الحد الأدنى. يمكن أن تتراوح قيم PT100 بين -200.0 و
650.0 للإدخال ، 0 و 20000 للأنواع الأخرى. |
| الحد الأقصى لقيمة المقياس | مقياس العمل هو قيمة الحد الأعلى. يمكن أن تتراوح قيم PT100 بين -200.0 و
650.0 للإدخال ، 0 و 20000 للأنواع الأخرى. |
| القيمة النسبية للتدفئة | القيمة النسبية للتدفئة. يمكن أن تأخذ قيمًا بين 0.0 و 100.0. |
| القيمة التكاملية للتدفئة | قيمة متكاملة للتدفئة. يمكن أن يستغرق قيمًا بين 0 و 3600 ثانية. |
| القيمة المشتقة للتدفئة | القيمة المشتقة للتدفئة. يمكن أن تأخذ قيمًا بين 0.0 و 999.9. |
| قيمة التبريد المتناسبة | القيمة النسبية للتبريد. يمكن أن تأخذ قيمًا بين 0.0 و 100.0. |
| قيمة التبريد المتكاملة | قيمة متكاملة للتبريد. يمكن أن يستغرق قيمًا بين 0 و 3600 ثانية. |
| القيمة المشتقة للتبريد | القيمة المشتقة للتبريد. يمكن أن تأخذ قيمًا بين 0.0 و 999.9. |
| فترة الإخراج | الإخراج هو فترة التحكم. يمكن أن يستغرق قيمًا تتراوح بين 1 و 150 ثانية. |
| اختيار التدفئة / التبريد | يحدد عملية القناة لـ PID أو ON / OFF. 0 = تسخين 1 = تبريد |
| لحن السيارات | يبدأ تشغيل Auto Tune لـ PID.
0 = الضبط التلقائي الخامل 1 = الموالفة التلقائية نشطة |
- ملحوظة: بالنسبة للقيم الموجودة في التدوين المنقط ، يتم استخدام 10 أضعاف القيمة الحقيقية لهذه المعلمات في اتصال Modbus.
عناوين PID Modbus:
| المعلمة | AI1
عنوان |
AI2
عنوان |
AI3
عنوان |
AI4
عنوان |
AI5
عنوان |
تقصير |
| نشط PID | 40023 | 40043 | 40063 | 40083 | 40103 | 0 |
| تعيين القيمة | 40024 | 40044 | 40064 | 40084 | 40104 | 0 |
| تعيين الإزاحة | 40025 | 40045 | 40065 | 40085 | 40105 | 0 |
| تعويض الاستشعار | 40038 | 40058 | 40078 | 40098 | 40118 | 0 |
| ضبط التباطؤ | 40026 | 40046 | 40066 | 40086 | 40106 | 0 |
| الحد الأدنى لقيمة المقياس | 40027 | 40047 | 40067 | 40087 | 40107 | 0/-200.0 |
| الحد الأقصى لقيمة المقياس | 40028 | 40048 | 40068 | 40088 | 40108 | 20000/650.0 |
| القيمة النسبية للتدفئة | 40029 | 40049 | 40069 | 40089 | 40109 | 10.0 |
| القيمة التكاملية للتدفئة | 40030 | 40050 | 40070 | 40090 | 40110 | 100 |
| القيمة المشتقة للتدفئة | 40031 | 40051 | 40071 | 40091 | 40111 | 25.0 |
| قيمة التبريد المتناسبة | 40032 | 40052 | 40072 | 40092 | 40112 | 10.0 |
| قيمة التبريد المتكاملة | 40033 | 40053 | 40073 | 40093 | 40113 | 100 |
| القيمة المشتقة للتبريد | 40034 | 40054 | 40074 | 40094 | 40114 | 25.0 |
| فترة الإخراج | 40035 | 40055 | 40075 | 40095 | 40115 | 1 |
| اختيار التدفئة / التبريد | 40036 | 40056 | 40076 | 40096 | 40116 | 0 |
| لحن السيارات | 40037 | 40057 | 40077 | 40097 | 40117 | 0 |
| قيمة الإخراج الفوري PID (٪) | 30024 | 30032 | 30040 | 30048 | 30056 | - |
| بت حالة PID | 30025 | 30033 | 30041 | 30049 | 30057 | - |
| بت تكوين PID | 40039 | 40059 | 40079 | 40099 | 40119 | 0 |
| بتات حالة الضبط التلقائي | 30026 | 30034 | 30042 | 30050 | 30058 | - |
بت تكوين PID:
| عنوان AI1 | عنوان AI2 | عنوان AI3 | عنوان AI4 | عنوان AI5 | وصف |
| 40039.0قليل | 40059.0قليل | 40079.0قليل | 40099.0قليل | 40119.0قليل | توقف PID:
0 = تستمر عملية PID. 1 = تم إيقاف PID وإيقاف تشغيل الإخراج. |
بت حالة PID:
| عنوان AI1 | عنوان AI2 | عنوان AI3 | عنوان AI4 | عنوان AI5 | وصف |
| 30025.0قليل | 30033.0قليل | 30041.0قليل | 30049.0قليل | 30057.0قليل | حالة حساب PID:
0 = حساب PID 1 = PID غير محسوب. |
|
30025.1قليل |
30033.1قليل |
30041.1قليل |
30049.1قليل |
30057.1قليل |
حالة الحساب المتكامل:
0 = حساب التكامل 1 = لا يتم حساب التكامل |
بتات حالة الضبط التلقائي:
| عنوان AI1 | عنوان AI2 | عنوان AI3 | عنوان AI4 | عنوان AI5 | وصف |
| 30026.0قليل | 30034.0قليل | 30042.0قليل | 30050.0قليل | 30058.0قليل | حالة الخطوة الأولى للضبط التلقائي:
1 = الخطوة الأولى نشطة. |
| 30026.1قليل | 30034.1قليل | 30042.1قليل | 30050.1قليل | 30058.1قليل | حالة الخطوة الثانية للضبط التلقائي:
1 = الخطوة الثانية نشطة. |
| 30026.2قليل | 30034.2قليل | 30042.2قليل | 30050.2قليل | 30058.2قليل | حالة الخطوة الثالثة للضبط التلقائي:
1 = الخطوة الثالثة نشطة. |
| 30026.3قليل | 30034.3قليل | 30042.3قليل | 30050.3قليل | 30058.3قليل | حالة الخطوة النهائية للضبط التلقائي:
1 = اكتمال الضبط التلقائي. |
| 30026.4قليل | 30034.4قليل | 30042.4قليل | 30050.4قليل | 30058.4قليل | خطأ مهلة الضبط التلقائي:
1 = هناك مهلة. |
تثبيت إعدادات الاتصال افتراضيًا
للبطاقات ذات الإصدار V01 ؛
- أوقف تشغيل جهاز وحدة الإدخال / الإخراج.
- ارفع غطاء الجهاز.
- دبابيس ماس كهربائى 2 و 4 على المقبس الموضح في الصورة.
- انتظر لمدة ثانيتين على الأقل عن طريق التنشيط. بعد ثانيتين ، ستعود إعدادات الاتصال إلى الوضع الافتراضي.
- قم بإزالة ماس كهربائى.
- أغلق غطاء الجهاز.
للبطاقات ذات الإصدار V02 ؛
- أوقف تشغيل جهاز وحدة الإدخال / الإخراج.
- ارفع غطاء الجهاز.
- ضع وصلة مرور على المقبس الموضح في الصورة.
- انتظر لمدة ثانيتين على الأقل عن طريق التنشيط. بعد ثانيتين ، ستعود إعدادات الاتصال إلى الوضع الافتراضي.
- قم بإزالة العبور.
- أغلق غطاء الجهاز.
Modbus تحديد عنوان الرقيق
يمكن تعيين عنوان الرقيق من 1 إلى 255 على العنوان 40001 من modbus. بالإضافة إلى ذلك ، يمكن استخدام مفتاح Dip على البطاقة لتعيين العنوان التابع على بطاقات V02.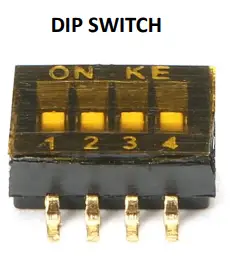
| مفتاح DIP | ||||
| شريحة ID | 1 | 2 | 3 | 4 |
| Not1 | ON | ON | ON | ON |
| 1 | عن | ON | ON | ON |
| 2 | ON | عن | ON | ON |
| 3 | عن | عن | ON | ON |
| 4 | ON | ON | عن | ON |
| 5 | عن | ON | عن | ON |
| 6 | ON | عن | عن | ON |
| 7 | عن | عن | عن | ON |
| 8 | ON | ON | ON | عن |
| 9 | عن | ON | ON | عن |
| 10 | ON | عن | ON | عن |
| 11 | عن | عن | ON | عن |
| 12 | ON | ON | عن | عن |
| 13 | عن | ON | عن | عن |
| 14 | ON | عن | عن | عن |
| 15 | عن | عن | عن | عن |
- ملاحظة 1: عندما تكون جميع مفاتيح Dip في وضع التشغيل ، يتم استخدام القيمة في Modbus Register 40001 كعنوان تابع.
ضمان
هذا المنتج مضمون ضد عيوب المواد والتصنيع لمدة عامين من تاريخ الشحن إلى المشتري. يقتصر الضمان على إصلاح أو استبدال الوحدة المعيبة حسب اختيار الشركة المصنعة. يعتبر هذا الضمان باطلاً إذا تم تغيير المنتج أو إساءة استخدامه أو تفكيكه أو إساءة استخدامه بطريقة أخرى.
صيانة
يجب ألا يتم إجراء الإصلاحات إلا من قبل موظفين مدربين ومتخصصين. قم بقطع الطاقة عن الجهاز قبل الوصول إلى الأجزاء الداخلية. لا تنظف العلبة بمذيبات أساسها الهيدروكربونات (بنزين ، ثلاثي كلورو إيثيلين ، إلخ). يمكن أن يقلل استخدام هذه المذيبات من الموثوقية الميكانيكية للجهاز.
معلومات اخرى
- معلومات الشركة المصنعة:
- شركة Emko Elektronik Sanayi ve Ticaret A.Ş.
- تنظيم بورصة Sanayi Bölgesi ، (فتحية OSB Mah.)
- علي عثمان سونميز بولفاري ، 2. سوكاك ، رقم: 3 16215
- بورصا / تركيا
- هاتف : (224) 261 1900
- الفاكس : (224) 261 1912
- معلومات خدمة الإصلاح والصيانة:
- شركة Emko Elektronik Sanayi ve Ticaret A.Ş.
- تنظيم بورصة Sanayi Bölgesi ، (فتحية OSB Mah.)
- علي عثمان سونميز بولفاري ، 2. سوكاك ، رقم: 3 16215
- بورصا / تركيا
- هاتف : (224) 261 1900
- الفاكس : (224) 261 1912
المستندات / الموارد
 |
وحدة الإدخال أو الإخراج EMKO PROOP [بي دي اف] دليل المستخدم PROOP ، وحدة الإدخال أو الإخراج ، وحدة إدخال أو إخراج PROOP ، وحدة الإدخال ، وحدة الإخراج ، الوحدة النمطية |



